To zamontuj telemetrie po wifi i będziesz mógł się łączyć tabletem komórka czy laptopem. Moduł kosztuje max 10$gumiś pisze:To nie jest łódka zanętowa, ot taki sobie stateczek zbudowany na bazie kadłuba holownika "Klimek".
Maxiii, rozumiem, że zalecasz wpisanie ręczne z kompa do programu punktów zwrotnych trasy. To jest to właśnie, czego chciałem uniknąć, strasznie kłopotliwy jest dostęp do złącza usb. Statek ma płynąć w określone miejsca i później to powtórzyć.
Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Moderatorzy: moderatorzy2014, moderatorzy
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.

Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Cytuję sam siebie - czy to już pora?maxiiii pisze:Zaznaczanir jest na kanale 7.
Na próbę zrób ręcznie trasę
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Witam ponownie, widzę że temat trochę przycichł dlatego ja mam pytanie dla niektórych pewnie banalne :)
Zauważyłem że w aparaturze FS-iA6 napięcie odbiornika po podłączeniu Apm to 4,5 v , zdarzało się tak że po pokonanym dystansie około 100 metrów i otworzeniu komory aparatura traciła zasięg
Obecnie Apm mam zasilany przez Bec tak jak na zdjęciu (kanał 2 PW) pod kanałem 1 jest serwo, niedawno doczytałem że pod PM nie powinno się podłączać serwa, zapewne stąd ten spadek.
Czy wystarczy że jeśli zakupie Power Module i podłącze to pod aku żel 12v wyjmę zworkę JP1 czy zasilanie będzie wtedy prawidłowe i tak to powinno wyglądać ?
Czy przy takim połączeniu serwo które jest wpięte do PM nie będzie już potrzebowało dodatkowego zasilania Np Bec ? , no i czy muszę pod drugie gniazdo w power module coś podłączać ? czy mogę zostawić tak jak to opisałem.
Zauważyłem że w aparaturze FS-iA6 napięcie odbiornika po podłączeniu Apm to 4,5 v , zdarzało się tak że po pokonanym dystansie około 100 metrów i otworzeniu komory aparatura traciła zasięg
Obecnie Apm mam zasilany przez Bec tak jak na zdjęciu (kanał 2 PW) pod kanałem 1 jest serwo, niedawno doczytałem że pod PM nie powinno się podłączać serwa, zapewne stąd ten spadek.
Czy wystarczy że jeśli zakupie Power Module i podłącze to pod aku żel 12v wyjmę zworkę JP1 czy zasilanie będzie wtedy prawidłowe i tak to powinno wyglądać ?
Czy przy takim połączeniu serwo które jest wpięte do PM nie będzie już potrzebowało dodatkowego zasilania Np Bec ? , no i czy muszę pod drugie gniazdo w power module coś podłączać ? czy mogę zostawić tak jak to opisałem.
- Załączniki
-
- 20170522_143718 (Kopiowanie) (2).jpg (290.6 KiB) Przejrzano 5305 razy
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Potrzebuję porady specjalistów... Ogarnąłem w końcu APM-a lecz mam dość istotny problem. Próbuję powpinać wszystkie niezbędne podzespoły w łódce i o ile nie ma żadnego problemu z oświetleniem nawigacyjnym - diodowym czy halogenem, to przy próbie wpięcia i użycia klap spustowych które otwierają się równocześnie sterowane dwoma serwami Hitec HS 322HD - spiętymi razem kabelkiem typu Y - to dzieje się tak https://www.youtube.com/watch?v=4OqwCM5YmkY
Jeżeli APM nie jest wpięty to wygląda to w miarę normalnie czyli tak https://www.youtube.com/watch?v=T_kWqf_XTbs
Czy ktoś podpowie jak można rozwiązać ten problem?? Chyba nie mogę wpiąć serw do APM-a ?? A łódka zanętowa bez możliwości zanęcania traci swoją podstawową funkcję. Dla uzupełnienia - nadajnik FlySky I6X+ odbiornik 10 kanałowy - regulatory http://www.prolam.pl/?page_id=763 Bardzo proszę o pomoc!
Jeżeli APM nie jest wpięty to wygląda to w miarę normalnie czyli tak https://www.youtube.com/watch?v=T_kWqf_XTbs
Czy ktoś podpowie jak można rozwiązać ten problem?? Chyba nie mogę wpiąć serw do APM-a ?? A łódka zanętowa bez możliwości zanęcania traci swoją podstawową funkcję. Dla uzupełnienia - nadajnik FlySky I6X+ odbiornik 10 kanałowy - regulatory http://www.prolam.pl/?page_id=763 Bardzo proszę o pomoc!

Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
...masz za duzy spadek napiecia bo UBEC w regulatorze nie wyrabia (nic dziwnego bo ma tylko teoretycznie max 2A a twoje same serwa biora ok. 2x0,7A=1,4A) , musisz dac osobne zasilanie na serwa a do APM podlaczyc tylko przewod sygnalowy serwa i masa.
Niskie loty FPV: http://www.youtube.com/watch?v=gCJiod3A ... be&t=8m59s
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Wesprze kolega jakimś szkicem poglądowym tutaj lub na PW ?? Będzie mnie staremu łatwiej jak to sobie obejrzęwaszka pisze:...masz za duzy spadek napiecia bo UBEC w regulatorze nie wyrabia (nic dziwnego bo ma tylko teoretycznie max 2A a twoje same serwa biora ok. 2x0,7A=1,4A) , musisz dac osobne zasilanie na serwa a do APM podlaczyc tylko przewod sygnalowy serwa i masa.
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
...do czarnego czy brązowego (masa) i czerwonego (napiecie) przewodow serwa podlaczasz osobne zasilanie 5V a do APM podlaczasz tylko przewod sygnalowy (bialy albo zólty) i mase jesli to inne zrodlo napiecia.
Niskie loty FPV: http://www.youtube.com/watch?v=gCJiod3A ... be&t=8m59s
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Zrobiłem to troszeczkę inaczej z pomocą kolegi "po kiju" i problem już rozwiązany. Dziękuję!
-
matikrul87
- Posty: 2
- Rejestracja: piątek 24 lis 2017, 10:58
- Lokalizacja: Brzeg
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
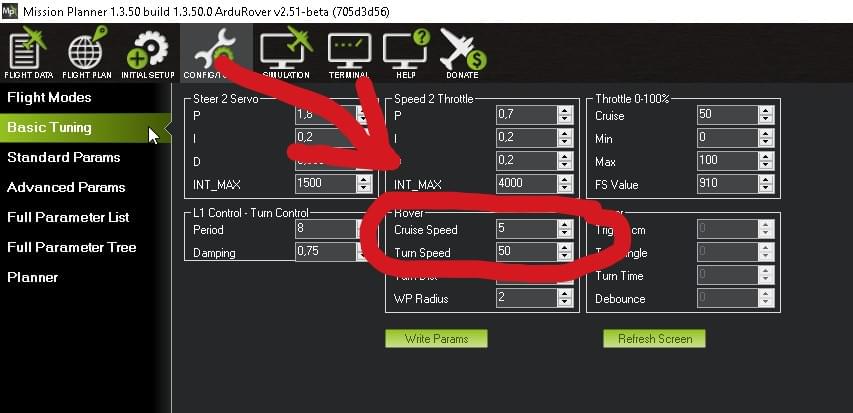
Witam szukam pomocy w którym miejscu w missionplayer ustawia się obroty silników żeby pływała wolniej w trybie auto
-
matikrul87
- Posty: 2
- Rejestracja: piątek 24 lis 2017, 10:58
- Lokalizacja: Brzeg
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Dziękuję
Edytuj posty!
Witam może ktoś się jeszcze znajdzie z takim problemem odnośnie wpisania pliku na APM2.8 po brubie zapisania ustawien każdy parametr z ustawien wyskakuje failed proszę bardzo o pomoc widziałem że ktos miał ten problem ale nie było rozwiązania
Edytuj posty!
Witam może ktoś się jeszcze znajdzie z takim problemem odnośnie wpisania pliku na APM2.8 po brubie zapisania ustawien każdy parametr z ustawien wyskakuje failed proszę bardzo o pomoc widziałem że ktos miał ten problem ale nie było rozwiązania
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Witam
Mam problem na połączeniu się z Pixhaw z Mavlink gdy łódka jest wyłączona jakiś dłuższy czas to po załączeniu nie mogę od razu
nawiązać połączenia, muszę załączyć Pixhaw na około 1 min (w mavlink miga tylko zielona dioda) po czym wyłączyć i ponownie włączyć i wtedy (w mavlink miga zielona oraz czerwona dioda na przemian ) wtedy można nawiązać dopiero połączenie. Dlaczego tak się dzieje?
Edytuj posty!
Witam
Mam jeszcze jeden problem otóż wyobraźcie sobie taka sytuacje:
Wypływam łódka z automatu do docelowego punktu i nagle antena zahacza mi o żyłki wiec daje pauzę i przełączam na tryb manualny wyprowadzam łódkę z żyłek i ponownie włączam tryb autopilota łódka super dopływa do celu ale nie otwiera klap tak jakby w zadanym programie nie widziała komendy set serwo, dodam tylko ze jak dam autopilota i nie przerywam misji to pięknie wszystko działa .Wygląda to tak jakby aparatura trzymała cały czas serwo i nie pozwoliła go zwolnic.Czy ktoś się spotkał z takim przypadkiem.Kiedyś na starej aparaturze jak ja wyłączyłem to załączał się tryb bezpieczny i pixavik chciał wracać do RTL teraz po zmianie redia na FlySky FS-i6
ten tryb tez nie nie działa dlaczego?Został tez zmieniony soft Rower dedykowany z Mission planner na najnowszy.
Mam problem na połączeniu się z Pixhaw z Mavlink gdy łódka jest wyłączona jakiś dłuższy czas to po załączeniu nie mogę od razu
nawiązać połączenia, muszę załączyć Pixhaw na około 1 min (w mavlink miga tylko zielona dioda) po czym wyłączyć i ponownie włączyć i wtedy (w mavlink miga zielona oraz czerwona dioda na przemian ) wtedy można nawiązać dopiero połączenie. Dlaczego tak się dzieje?
Edytuj posty!
Witam
Mam jeszcze jeden problem otóż wyobraźcie sobie taka sytuacje:
Wypływam łódka z automatu do docelowego punktu i nagle antena zahacza mi o żyłki wiec daje pauzę i przełączam na tryb manualny wyprowadzam łódkę z żyłek i ponownie włączam tryb autopilota łódka super dopływa do celu ale nie otwiera klap tak jakby w zadanym programie nie widziała komendy set serwo, dodam tylko ze jak dam autopilota i nie przerywam misji to pięknie wszystko działa .Wygląda to tak jakby aparatura trzymała cały czas serwo i nie pozwoliła go zwolnic.Czy ktoś się spotkał z takim przypadkiem.Kiedyś na starej aparaturze jak ja wyłączyłem to załączał się tryb bezpieczny i pixavik chciał wracać do RTL teraz po zmianie redia na FlySky FS-i6
ten tryb tez nie nie działa dlaczego?Został tez zmieniony soft Rower dedykowany z Mission planner na najnowszy.
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Witam, Chciałbym się jeszcze jednej rzeczy zapytać, Otóż łódka w trybie Guide i Rth płynie już idealnie prostu lecz po
załadowaniu waypointa i wciśnięciu Auto łódka płynie do punktu "wężykiem"
Dlaczego tak się dzieje ?
Czy jest jakaś możliwość przeniesienia tych ustawień z Guide i Rth do trybu Auto ?
Czy potrzeba tu jeszcze ruszać Pidy, jeśli w Guide i Rth płynie prosto ?
załadowaniu waypointa i wciśnięciu Auto łódka płynie do punktu "wężykiem"
Dlaczego tak się dzieje ?
Czy jest jakaś możliwość przeniesienia tych ustawień z Guide i Rth do trybu Auto ?
Czy potrzeba tu jeszcze ruszać Pidy, jeśli w Guide i Rth płynie prosto ?
- Załączniki
-
- Screenshot_20180106-141943 (Kopiowanie) (2).png (349.99 KiB) Przejrzano 4667 razy
-
szreder.pawel
- Posty: 7
- Rejestracja: sobota 10 lut 2018, 19:40
- Lokalizacja: Wrocław
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Witam serdecznie,
Próbuję skonfigurować APM 2.8, ale mam problem z uruchomieniem GPS UBLOX NEO-7M. Jest to sprzęt z wbudowanym kompasem. Sam GPS łapie mi fix-a, ale jakiej był nie zastosował konfiguracji i sposobu podłączenia - nie mogę złapać kontaktu z kompasem w GPS.
Ten wbudowany w APM zdaje się działać (reaguje). Gdy zaczynam kombinować ze zworką, podłączeniem wtyczki kompasu do gniazda pod gniazdem GPS lub do I2C - kompas przestaje całkowicie reagować. Próbowałem również sposobu opisanego tutaj przez jedną osobę https://www.dronetrest.com/t/apm-2-8-an ... ing/1194/3 - czyli zmostkowanie padów MUX_SCL i MUX_SCA (choć nie wiem, na ile to ma sens?), ale niestety również bez rezultatu.
Czy ktoś z Was używa podobnego zestawu i mógłby mi udzielić info, w jaki sposób poprawnie podłączyć GPS (z kompasem) do APM, jak ustawić zworki i jak skonfigurować kompas w parametrach?
Próbuję skonfigurować APM 2.8, ale mam problem z uruchomieniem GPS UBLOX NEO-7M. Jest to sprzęt z wbudowanym kompasem. Sam GPS łapie mi fix-a, ale jakiej był nie zastosował konfiguracji i sposobu podłączenia - nie mogę złapać kontaktu z kompasem w GPS.
Ten wbudowany w APM zdaje się działać (reaguje). Gdy zaczynam kombinować ze zworką, podłączeniem wtyczki kompasu do gniazda pod gniazdem GPS lub do I2C - kompas przestaje całkowicie reagować. Próbowałem również sposobu opisanego tutaj przez jedną osobę https://www.dronetrest.com/t/apm-2-8-an ... ing/1194/3 - czyli zmostkowanie padów MUX_SCL i MUX_SCA (choć nie wiem, na ile to ma sens?), ale niestety również bez rezultatu.
Czy ktoś z Was używa podobnego zestawu i mógłby mi udzielić info, w jaki sposób poprawnie podłączyć GPS (z kompasem) do APM, jak ustawić zworki i jak skonfigurować kompas w parametrach?
Re: Autopilot do łódki zanętowej APM 2.8 - oprogramowanie.
Kompas sam się powinien wykryć, wtedy ten z GPS staje się compass #1 a ten wbudowany #2. Jak masz zrobioną wiązkę? U siebie walczyłem chwilę, miałem masę puszczoną od gniazda GPS w pixie do gpsa, ale nie miałem puszczonej masy od gniazda kompasu do gpsa (wspólny pin), bo myślałem, że masa to masa i że i tak jest połączona po stronie pixa - a jednak nie :)
Smart 650W Battery Discharger
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S
Dragon X5 220/Matek F405-STD/Racerstar 30A ESC + Racerstar 2306S/5045@3S
Quadcopter 390/Matek F722-STD/Racerstar 30A ESC + Racerstar 2216/1038@4S
Octocopter 900/Pixhawk 2.4.8/Racerstar 30A ESC + Racerstar 4114/2060@4S