
Możesz spróbować z serwem.
Ale koniecznie sprawdź FPV_managerem sygnały wejściowe i wyjściowe
-zdejmij śmigło, ale zostaw podłaczony silnik i regulator
- podłacz AP do komputera (USB) i w FPV_managerze przejdz na autopilot->radio PPM
-podłacz całe zasilanie modelu
-zmieniaj gaz i obserwuj "słupki" i liczby dla gazu zarówno wejściowe jak i wyjściowe. Poruszaj tez innymi kanalami i sprawdż czy silnik chodzi płynnie, nie reaguje na inne drązki i czy słupki nie skaczą.
Autopilot by Zbig & Pitlab
Moderatorzy: marbalon, moderatorzy2014, moderatorzy
Re: Autopilot by Zbig & Pitlab
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107

Re: Autopilot by Zbig & Pitlab
Jak na moje oko to nic złego sie nie dzieje. Mało tego silnik beż smigła chodzi prawidłowo co słychac na filmie. 
Pozdrawiam Darek
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]

Re: Autopilot by Zbig & Pitlab
Z oddzielnego pakietu 3S. SIlnik z 4S i z tego samego pakietu przez zewnętrzny UBEC serwa i odbiornik
Pozdrawiam Darek
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
Re: Autopilot by Zbig & Pitlab
Dzisiaj zrobiłem test sterując regulator bezpośrednio z eleresa. W całym zakresie regulacji regulator i silnik pracuja prawidłowo  silnik nie przerywa i nie zwalnia. Jedyny problem jaki sie pojawia to po zmniejszeniu gazu z max na minimum obroty spadaja dopiero po chwili co widac na filmie. Jeżeli nie dawałem gazu na max to takie zjawiska nie zaobserwowałem.
silnik nie przerywa i nie zwalnia. Jedyny problem jaki sie pojawia to po zmniejszeniu gazu z max na minimum obroty spadaja dopiero po chwili co widac na filmie. Jeżeli nie dawałem gazu na max to takie zjawiska nie zaobserwowałem.
Robiłem testy na mniejszych śmigłach , ale niestety jedyne mniejsze mialem na 10x4.5 APC i na nim nie było żadnych problemów, oprócz tego że model na maksymalnych obrotach ledwo co zaczynał ruszac z podłoża
Może wystarczy ograniczyć obroty , lub zmniejszyć nieznacznie śmigło i wtedy może problem nie będzie występował. Aczkolwiek to ciekawe, że zestaw napędowy inaczej się zachowuje sterowany z AP i inaczej z odbiornika Co może być powodem?
Co może być powodem?
Robiłem testy na mniejszych śmigłach , ale niestety jedyne mniejsze mialem na 10x4.5 APC i na nim nie było żadnych problemów, oprócz tego że model na maksymalnych obrotach ledwo co zaczynał ruszac z podłoża
Może wystarczy ograniczyć obroty , lub zmniejszyć nieznacznie śmigło i wtedy może problem nie będzie występował. Aczkolwiek to ciekawe, że zestaw napędowy inaczej się zachowuje sterowany z AP i inaczej z odbiornika
Pozdrawiam Darek
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
NAZA MLITE , Sky Cruiser 2400 GEMINI 3200]
Re: Autopilot by Zbig & Pitlab
To mogą być zakłócenia np wynikające z problemów z połączeniami mas i rozpływem prądów. Czy możesz namalować połączenia zasilania/masy rgulatora, UBEC-a, czujnika prądu i AP?
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
-
strzelczykadam
- Posty: 20
- Rejestracja: sobota 02 sie 2014, 12:59
- Lokalizacja: Mielec
Re: Autopilot by Zbig & Pitlab
Witam.
Przegladam forum w poszukiwaniu polskiej dokumentacji do nowego wydania 2.50.
Mam SkySurfera 2000 z kanapką PitLab @ Zbig AP i OSD
Lata super ale po aktualizacji chcę automatycznie lądować i wspomagać start z ręki, dlatego mam kilka pytań.
Zdefiniowałem pasy startowe.
Jest Ok ale w którym miejscu prostokąta symbolizującego pas jest punkt przyziemienia?
Czy na progu pasa.
Rozumiem, że jak włączę klapy to mogę podchodzić na większych kątach i krótkim "dobiegu"?!
Tylko gdzie on wtedy przyziemi?
pasy nr 4 i 5
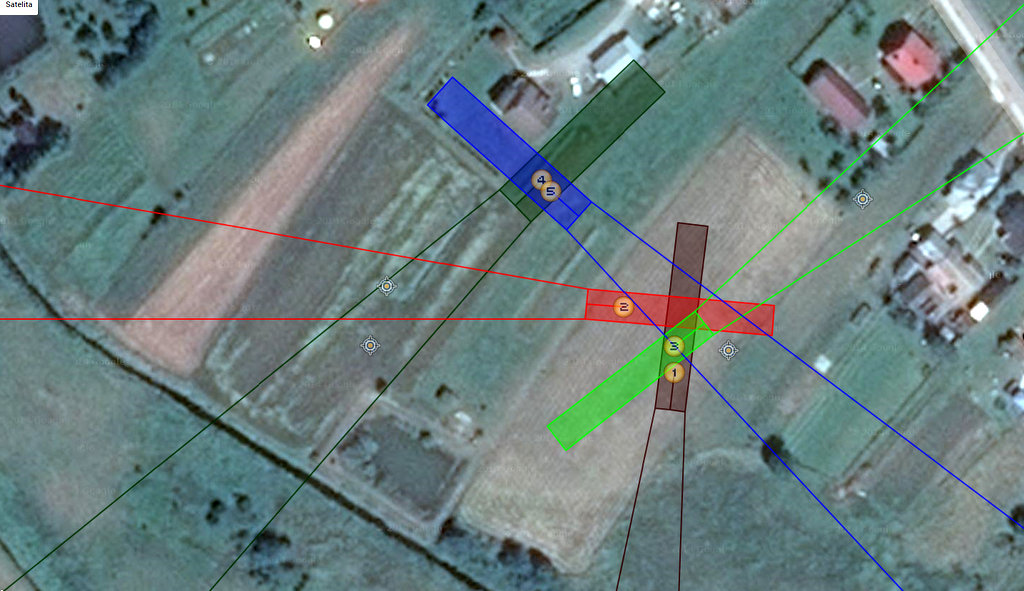
Pasy 1,2 i 3 są na nie mojej działce
Bez AP ląduję w zależności od wiatru nawet w miejscu, bezwietrznie 10-30 m
Jak działa wspomaganie startu?
Czy jak wyrzucę model z ręki to on będzie ustawiał się pod pewnym kątek do góry
i poziomował poprzecznie lot? a silnik ja muszę sterować gazem? tak?
Jak włączyć ten tryb.
Mam krótkie pasy startowe o szerokości 12m i długości 40m jeden i drugi 45 m
Po przyziemieniu wystarczy kilka metrów żeby się zatrzymał model.
Jak ustawiać pasy na mapie gdy zdefiniowany nie może być krótszy niż 50 a moje pasy są krótsze.
Proszę o pomoc
Adam S
Przegladam forum w poszukiwaniu polskiej dokumentacji do nowego wydania 2.50.
Mam SkySurfera 2000 z kanapką PitLab @ Zbig AP i OSD
Lata super ale po aktualizacji chcę automatycznie lądować i wspomagać start z ręki, dlatego mam kilka pytań.
Zdefiniowałem pasy startowe.
Jest Ok ale w którym miejscu prostokąta symbolizującego pas jest punkt przyziemienia?
Czy na progu pasa.
Rozumiem, że jak włączę klapy to mogę podchodzić na większych kątach i krótkim "dobiegu"?!
Tylko gdzie on wtedy przyziemi?
pasy nr 4 i 5
Pasy 1,2 i 3 są na nie mojej działce
Bez AP ląduję w zależności od wiatru nawet w miejscu, bezwietrznie 10-30 m
Jak działa wspomaganie startu?
Czy jak wyrzucę model z ręki to on będzie ustawiał się pod pewnym kątek do góry
i poziomował poprzecznie lot? a silnik ja muszę sterować gazem? tak?
Jak włączyć ten tryb.
Mam krótkie pasy startowe o szerokości 12m i długości 40m jeden i drugi 45 m
Po przyziemieniu wystarczy kilka metrów żeby się zatrzymał model.
Jak ustawiać pasy na mapie gdy zdefiniowany nie może być krótszy niż 50 a moje pasy są krótsze.
Proszę o pomoc
Adam S
Re: Autopilot by Zbig & Pitlab
Punkt przyziemienia jest w miejscu ikony z numerem pasa (10m za krawędzią pasa).
Kąt podejścia powinieneś ustawić w definicji pasa mniej więcej zgodnie z charakterystyką szybowania (doskonałości) modelu. Punkt przyziemienia jest zawsze ten sam.
Wsparcie startu działa jak napisałeś, włącza się go w menu OSD "wsparcie startu" może byc jednorazowo lub automatycznie po każdym właczeniu ukladu.
W zalezności od warunków (wiatr, chwilowe noszenia/duszenia) przyziemienie może byc wczesniej lub później. Im wiekszy kąt podejścia (klapy) tym odchyłki powinny byc mniejsze. Do tego jest tolerancja pozycjonowania GPS, więc może być u Ciebie za ciasno na automatyczne ladowanie.
Kąt podejścia powinieneś ustawić w definicji pasa mniej więcej zgodnie z charakterystyką szybowania (doskonałości) modelu. Punkt przyziemienia jest zawsze ten sam.
Wsparcie startu działa jak napisałeś, włącza się go w menu OSD "wsparcie startu" może byc jednorazowo lub automatycznie po każdym właczeniu ukladu.
W zalezności od warunków (wiatr, chwilowe noszenia/duszenia) przyziemienie może byc wczesniej lub później. Im wiekszy kąt podejścia (klapy) tym odchyłki powinny byc mniejsze. Do tego jest tolerancja pozycjonowania GPS, więc może być u Ciebie za ciasno na automatyczne ladowanie.
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
-
strzelczykadam
- Posty: 20
- Rejestracja: sobota 02 sie 2014, 12:59
- Lokalizacja: Mielec
Re: Autopilot by Zbig & Pitlab
Dzięki za wyczerpującą informację.
EDIT -scalenie
Dobrze a kiedy rozpoczyna właściwe podejście do lądowania.
Latam nad bazę po okręgach, przyszła mi ochota wylądować, włączam AP i lądowanie.
Ustawiam klapy a na pasie kąt podejścia 10 może 12 stopni.
Zauważyłem że odchodzi daleko jakieś 300 m?
I schodzi do lądowania.
Przećwiczyłem raz bo przy drugim podejściu z innego kierunku regulator odłączył silnik
i musiałem ratować model przed sadzawką.
Wystarczy skleić belkę ogonową.
Pytanie
jak on zabiera się za to lądowanie.
bo mam wysokie drzewa od południa "strasznie" wysoki - jedno drzewo i nie chcę żeby na nim zawisnął.
czy liczy sobie minimalną drogę podejścia w oparciu o TDP i kąt zejścia.
no i się ustawia na pas. pracuje silnikiem do pewnej wysokości po czym wyłącza - na jakiej wysokości?
resztę drogi szybuje i miękkutko siada?
Od jakiej strony podchodzi do ścieżki zniżania?
Jak obliczyć tą drogę ścieżki zejścia do lądowania, czyli jak daleko ode mnie schodzi po ścieżce.
I rozumiem, że lata nad bazą w trybie AP na zadanej przeze mnie wysokości,
potem albo się zniża albo podnosi ? aby rozpocząć lądowanie.
Szukam wzoru jaki zastosować do obliczenia tej ścieżki podejścia.
proszę o wyjaśnienie tych zagadnień nowicjuszowi FPV i w ogóle dobrego lądowania.
pozdrawiam
Adam S.
EDIT -scalenie
Dobrze a kiedy rozpoczyna właściwe podejście do lądowania.
Latam nad bazę po okręgach, przyszła mi ochota wylądować, włączam AP i lądowanie.
Ustawiam klapy a na pasie kąt podejścia 10 może 12 stopni.
Zauważyłem że odchodzi daleko jakieś 300 m?
I schodzi do lądowania.
Przećwiczyłem raz bo przy drugim podejściu z innego kierunku regulator odłączył silnik
i musiałem ratować model przed sadzawką.
Wystarczy skleić belkę ogonową.
Pytanie
jak on zabiera się za to lądowanie.
bo mam wysokie drzewa od południa "strasznie" wysoki - jedno drzewo i nie chcę żeby na nim zawisnął.
czy liczy sobie minimalną drogę podejścia w oparciu o TDP i kąt zejścia.
no i się ustawia na pas. pracuje silnikiem do pewnej wysokości po czym wyłącza - na jakiej wysokości?
resztę drogi szybuje i miękkutko siada?
Od jakiej strony podchodzi do ścieżki zniżania?
Jak obliczyć tą drogę ścieżki zejścia do lądowania, czyli jak daleko ode mnie schodzi po ścieżce.
I rozumiem, że lata nad bazą w trybie AP na zadanej przeze mnie wysokości,
potem albo się zniża albo podnosi ? aby rozpocząć lądowanie.
Szukam wzoru jaki zastosować do obliczenia tej ścieżki podejścia.
proszę o wyjaśnienie tych zagadnień nowicjuszowi FPV i w ogóle dobrego lądowania.
pozdrawiam
Adam S.
Re: Autopilot by Zbig & Pitlab
W ustawieniach masz definiowalne parametry: długość ścieżki podejścia, kąt podejścia oraz kurs podejścia. Wysokość początku ścieżki podejścia (PŚP) obliczysz ze wzoru:
wysokość = długość_ścieżki * tangens(kąta podejścia), a położenie PŚP wynika z kursu podejścia i oczywiście długości ścieżki. Autopilot zawsze leci najpierw do punktu początku ścieżki podejścia (PŚP) i dolatuje tam na tej wyliczonej wysokości (jak trzeba to krąży tam dla nabrania lub wytracenia wysokości) i potem zaczyna właściwe podejście do lądowania (lecąc na lotnisko i zniżając wysokość).
Gdy już jest na wysokości poniżej 5m lub bliżej niz 15m od punktu przyziemienia "odcina" silnik i dalej tylko szybuje aż do przyziemienia.
UWAGA: gdy masz lotnisko na wysokości bazy zawsze ustaw w definicji lotniska AMSL na wartość "(baza)" i używaj wysokościomierza barometrycznego a nie GPS (w ustawieniach serwiswych)
wysokość = długość_ścieżki * tangens(kąta podejścia), a położenie PŚP wynika z kursu podejścia i oczywiście długości ścieżki. Autopilot zawsze leci najpierw do punktu początku ścieżki podejścia (PŚP) i dolatuje tam na tej wyliczonej wysokości (jak trzeba to krąży tam dla nabrania lub wytracenia wysokości) i potem zaczyna właściwe podejście do lądowania (lecąc na lotnisko i zniżając wysokość).
Gdy już jest na wysokości poniżej 5m lub bliżej niz 15m od punktu przyziemienia "odcina" silnik i dalej tylko szybuje aż do przyziemienia.
UWAGA: gdy masz lotnisko na wysokości bazy zawsze ustaw w definicji lotniska AMSL na wartość "(baza)" i używaj wysokościomierza barometrycznego a nie GPS (w ustawieniach serwiswych)
Pitlab & Zbig FPV System - więcej informacji:
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
http://www.bigaj.com.pl/fpvsystem
http://www.rcgroups.com/forums/showthread.php?t=2621107
-
strzelczykadam
- Posty: 20
- Rejestracja: sobota 02 sie 2014, 12:59
- Lokalizacja: Mielec
Re: Autopilot by Zbig & Pitlab
Dziękuję
pozdrawiam
Adam S
pozdrawiam
Adam S
Re: Autopilot by Zbig & Pitlab
To za dużo na taki model. Ja bym radził ustawić kąt podejścia 5-6 stopni, nie więcej. Jeśli masz drzewa to raczej nie próbuj lądowania od tej strony.strzelczykadam pisze:Ustawiam klapy a na pasie kąt podejścia 10 może 12 stopni.
pamiętaj, że w każdym momencie możesz wyłączyć automatyczne lądowanie przechodząc na tryb STAB lub OFF i przejąć samodzielnie kontrolę, silnik zacznie działać i odejdziesz na drugi krąg.strzelczykadam pisze:...regulator odłączył silnik i musiałem ratować model przed sadzawką.
Jeszcze warto przełączyć gaz na dynamiczny, gdyż wtedy AP płynnie operuje gazem aby wypoziomować się na ścieżce podejścia.
Jarek
SkyCruiser 2.4m, Rmielec 433MHz, 5,8GHz 2W video TX, PitLab OSD+AP+GS+Dedalus, Bevrc PV700.
SkyCruiser 2.4m, Rmielec 433MHz, 5,8GHz 2W video TX, PitLab OSD+AP+GS+Dedalus, Bevrc PV700.
-
strzelczykadam
- Posty: 20
- Rejestracja: sobota 02 sie 2014, 12:59
- Lokalizacja: Mielec
Re: Autopilot by Zbig & Pitlab
jwalentek - dzięki za wyjaśnienie.
Ale nurtuje mnie to podejście do lądowania
Ale definiując pas startowy w FPV menadżerze podaję nazwę, course, glideslope, width, lenght - wszystko o pasie startowym jak sądzę.
Nie ma długości ścieżki podejścia. Przecież lenght dotyczy pasa startowego a nie ścieżki podejścia.
Gdzie zdefiniować w FPV menadżerze długość ścieżki podejścia. Może robi się to w AP korzystając z apki?
Ale nurtuje mnie to podejście do lądowania
Zbig pisze w pierwszym zdaniu, że ustawiam długość ścieżki podejścia (chyba chodzi o pas startowy?).Zbig pisze:W ustawieniach masz definiowalne parametry: długość ścieżki podejścia, kąt podejścia oraz kurs podejścia. Wysokość początku ścieżki podejścia (PŚP) obliczysz ze wzoru:
wysokość = długość_ścieżki * tangens(kąta podejścia), a położenie PŚP wynika z kursu podejścia i oczywiście długości ścieżki. Autopilot zawsze leci najpierw do punktu początku ścieżki podejścia (PŚP) i dolatuje tam na tej wyliczonej wysokości (jak trzeba to krąży tam dla nabrania lub wytracenia wysokości) i potem zaczyna właściwe podejście do lądowania (lecąc na lotnisko i zniżając wysokość).
Gdy już jest na wysokości poniżej 5m lub bliżej niz 15m od punktu przyziemienia "odcina" silnik i dalej tylko szybuje aż do przyziemienia.
UWAGA: gdy masz lotnisko na wysokości bazy zawsze ustaw w definicji lotniska AMSL na wartość "(baza)" i używaj wysokościomierza barometrycznego a nie GPS (w ustawieniach serwiswych)
Ale definiując pas startowy w FPV menadżerze podaję nazwę, course, glideslope, width, lenght - wszystko o pasie startowym jak sądzę.
Nie ma długości ścieżki podejścia. Przecież lenght dotyczy pasa startowego a nie ścieżki podejścia.
Gdzie zdefiniować w FPV menadżerze długość ścieżki podejścia. Może robi się to w AP korzystając z apki?

Re: Autopilot by Zbig & Pitlab
Długość podejścia definiuje się w OSD na podglądzie fpv we właściwościach lądowiska.
X-UAV Mini-Talon, Pioneer FPV + skrzydła od EasyGlider'a, Turnigy er9x+eleresMOD+PPMexpander, Zbig&Pitlab OSD+AP,SONY TVL 600, FOX 800, Led kontroler by Karwas