
Krzys, tą instrukcję znam, na co dzień z niej korzystam i właśnie zgodnie z rysunkiem w niej wysunąłem swój wniosek, ale jednak wolałbym aby ktoś, kto się zna na diodach Zenera jednak potwierdził, lub zaprzeczył tej teorii. Niestety przy moich dochodach nie stać mnie na puszczenie z dymem FC. Myślę, że to jest chyba wystarczający powód do zadania pytania ?.
Co do zakłócania GPS'a przez X8R, to latam już kilka miesięcy z tym odbiornikiem przy włączonej telemetrii, hexą z NAZĄ 2 i jakichś niepokojących objawów zakłócania nie zauważyłem. Odbiornik znajduje się jakieś 15 cm od GPS'
Czarna hexa Pixhawk
Moderatorzy: moderatorzy2014, moderatorzy
Ostatnio zmieniony poniedziałek 20 paź 2014, 19:19 przez Lotnik54, łącznie zmieniany 2 razy.
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka


-
twistedme
Czyli to są zakłócenia z telemetrii? No z tego tekstu chyba jednoznacznie to nie wynika, aczkolwiek gość zmieniłby aparaturę na Spektrum zamiast napisać, żeby zwyczajnie zbindować X8R bez telemetrii?Kowal pisze:Wyłącz telemetrię, i nie będzie miało co zakłócać GPS-a
Masz OSD, to po co Ci telemetria z FrSky
http://www.rcgroups.com/forums/showpost ... stcount=26
Poczytam jeszcze przy okazji.
Wkoncu udało mi się pozbyć tego komunikatu w mission planner o złym certyfikacie. Skompilowałem nowy bootloader który zawiera prawidłowy certyfikat. Jak ktoś chce daje link do niego. Jest to gotowiec pod DFUse.
Bootloader
Działa na pewno sprawdziłem na swoim pixhawku.
Pozdrawiam
Bootloader
Działa na pewno sprawdziłem na swoim pixhawku.
Pozdrawiam


Witajcie Koledzy czy mogli byście się podjąć napisania krótkiej instrukcji krok po kroku jak od kupna przygotować Pixhawka do lotu żeby nić nie zepsuć po drodze
Może Shaggee dał by się namówić na założenie nowego tematu już nie o Czarnej hexie a tylko o pixhawku
bardzo jestem zainteresowany tym kontrolerem i przeczytałem wszystkie wątki ale taka upożądkowana wiedza była by bardzo pomocna
Może Shaggee dał by się namówić na założenie nowego tematu już nie o Czarnej hexie a tylko o pixhawku
bardzo jestem zainteresowany tym kontrolerem i przeczytałem wszystkie wątki ale taka upożądkowana wiedza była by bardzo pomocna
kolti, Tutaj masz wszystko od podłączenia po misje autonomiczne http://copter.ardupilot.com/
Prosze binarka jak obiecałem : Bootloader BIN
Działa
Jak obiecałem - opisuję i wyjaśniam
1. Wgrywamy plik BIN (udostępniony przez Szychora) do głównego katalogu na karcie SD, wyjętej z PIXHAWKa.
2. Wkładamy kartę z powrotem.
3. Robimy kabelek DF13(6)-FTDI (albo innego konwertera USB-UART, u mnie np. Prolific czy inny Silabs), patrząc na poniższe zdjęcie. Kabelek od strony PIXHAWKa będzie wpięty do gniazda SERIAL 4/5. Od lewej idą:
- nic,
- Tx (do Rx w konwerterze),
- Rx (do Tx w konwerterze),
- nic,
- nic,
- GND.
Jeżeli masz wgrany firmware inny niż ArduCopter, układ połączeń może być inny:
- nic,
- nic,
- nic,
- Tx (do Rx w konwerterze),
- Rx (do Tx w konwerterze),
- GND.

4. Kabelek łączymy z PIXHAWKiem i z konwerterem.
5. Podłączamy konwerter do PC i sprawdzamy, na jakim porcie się wykrył.
6. Odpalamy jakiś terminal (u mnie RealTerm) i łączymy się na port konwertera 57600/8-N-1.
7. Włączamy zasilanie PIXHAWKa, terminal powinien nam wypluć coś w rodzaju:
Jeżeli nie wypluje - spróbuj zamienić Rx z Tx albo spróbuj drugiej wersji układu pinów.
8. Dajemy kilka razy <Enter>, żeby zobaczyć, czy mamy połączenie i czy reaguje.
9. Jak jest OK, to wpisujemy:
Oczywiście powyższe jest OK, jeżeli nasz plik bootloadera nazywa się px4fmuv2_bl.bin
W odpowiedzi powinniśmy dostać:
Jeżeli wgrywaliśmy bootloader przy drugiej wersji układu pinów (dla firmware innego niż ArduCopter), na końcu może pojawić się wpis (bez znaczenia dla całego procesu):
I już
Jak obiecałem - opisuję i wyjaśniam
1. Wgrywamy plik BIN (udostępniony przez Szychora) do głównego katalogu na karcie SD, wyjętej z PIXHAWKa.
2. Wkładamy kartę z powrotem.
3. Robimy kabelek DF13(6)-FTDI (albo innego konwertera USB-UART, u mnie np. Prolific czy inny Silabs), patrząc na poniższe zdjęcie. Kabelek od strony PIXHAWKa będzie wpięty do gniazda SERIAL 4/5. Od lewej idą:
- nic,
- Tx (do Rx w konwerterze),
- Rx (do Tx w konwerterze),
- nic,
- nic,
- GND.
Jeżeli masz wgrany firmware inny niż ArduCopter, układ połączeń może być inny:
- nic,
- nic,
- nic,
- Tx (do Rx w konwerterze),
- Rx (do Tx w konwerterze),
- GND.
4. Kabelek łączymy z PIXHAWKiem i z konwerterem.
5. Podłączamy konwerter do PC i sprawdzamy, na jakim porcie się wykrył.
6. Odpalamy jakiś terminal (u mnie RealTerm) i łączymy się na port konwertera 57600/8-N-1.
7. Włączamy zasilanie PIXHAWKa, terminal powinien nam wypluć coś w rodzaju:
Kod: Zaznacz cały
mtd rwtest OK
Starting ArduPilot /dev/ttyACM0 /dev/ttyS1 /dev/ttyS2
Starting ArduCopter uartA=/dev/ttyACM0 uartC=/dev/ttyS1 uartD=/dev/ttyS2
initialised /dev/ttyS3 OK 512 512
initialised /dev/ttyS1 OK 512 512
initialised /dev/ttyS2 OK 512 512
ArduPilot started OK
rc.APM finished
NuttShell (NSH)
nsh> [K<fmuservo> MODE_4PWM
<fmuservo> set_pwm_rate 0 50 50
8. Dajemy kilka razy <Enter>, żeby zobaczyć, czy mamy połączenie i czy reaguje.
9. Jak jest OK, to wpisujemy:
Kod: Zaznacz cały
bl_update /fs/microsd/px4fmuv2_bl.binW odpowiedzi powinniśmy dostać:
Kod: Zaznacz cały
bl_update: image validated, erasing bootloader...
bl_update: flashing...
bl_update: verifying...
bl_update: bootloader update complete
Kod: Zaznacz cały
Overtime in task -1
Ostatnio zmieniony środa 22 paź 2014, 18:26 przez mkrawcz1, łącznie zmieniany 1 raz.
Doświadczenie - wiedza, którą zdobyłeś tuż po tym, kiedy była ci najbardziej potrzebna...
A może kolega także by opisał procedurę załadowania bootloadera swoją metodą dla mniej doświadczonych oraz potomnych. Prosiłbym także o link do pobrania DFUse.Szychor pisze:Wkoncu udało mi się pozbyć tego komunikatu w mission planner o złym certyfikacie. Skompilowałem nowy bootloader który zawiera prawidłowy certyfikat. Jak ktoś chce daje link do niego. Jest to gotowiec pod DFUse.
Bootloader
Działa na pewno sprawdziłem na swoim pixhawku.
Pozdrawiam
Pozdrowienia
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
Zamieszczam opis updateu bootloadera za pomocą programu DFUse.
Pobieramy program :DFUse
następnie bootloader pod dfu :Bootloader
Następnie przed podpięciem płytki to komputera musimy zrobić chwilową zworkę na płycie w celu wprowadzenie jej w tryb DFU(najłatwiej chyba zrobić to pęsetą):
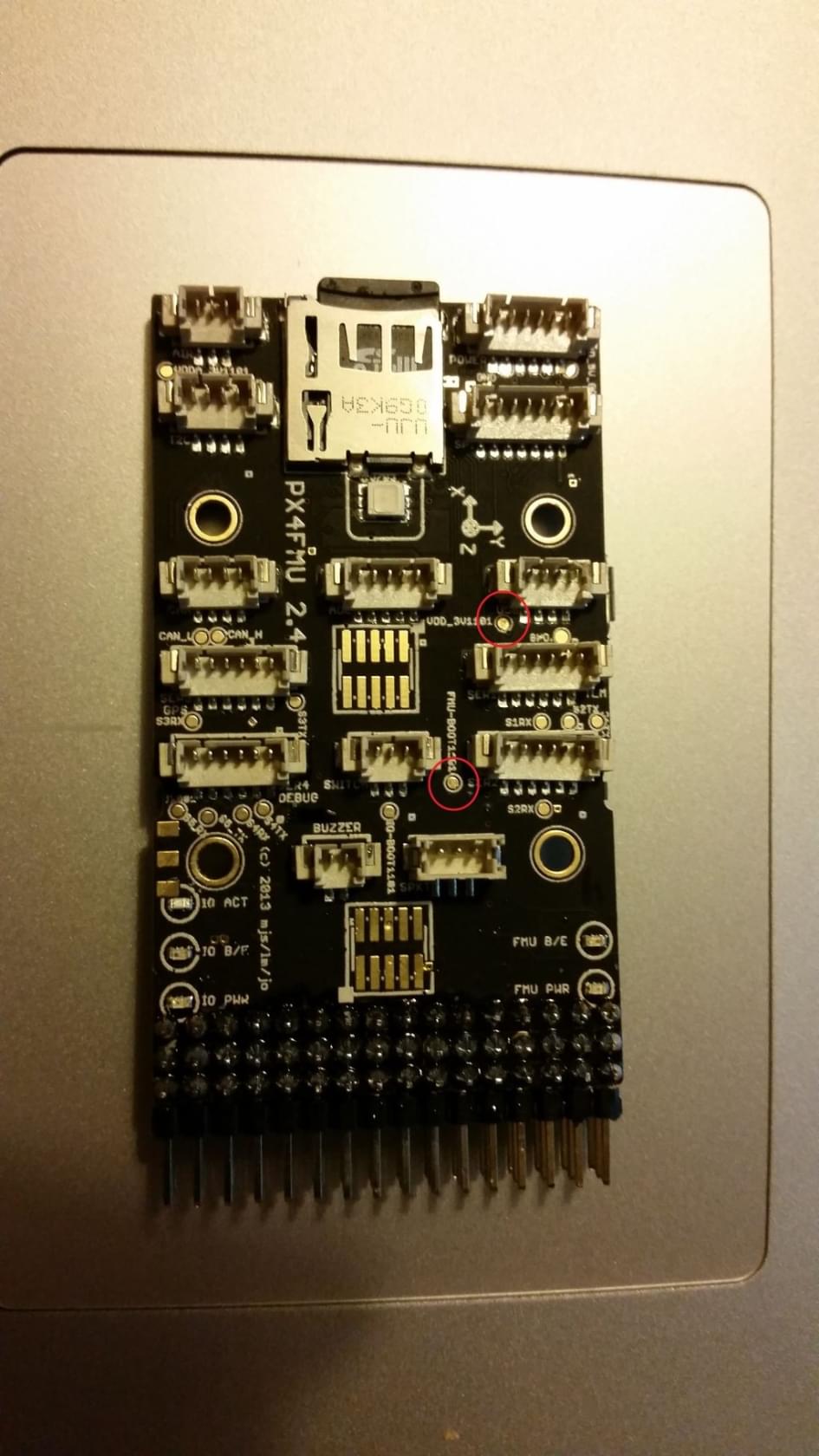
Następnie wpinamy kabel USB do komputera , uruchamiamy program DFUse , otowrzy się następujące okno :

Upewniamy się że w gornym lewym rogu mamy "STM device in DFu mode", jeśli nie to niedokładnie wykonaliśmy zworke.
Następnie jeśli udało nam się juz wprowadzić ją w tryb DFU, przechodzimy do dolnego panelu "Upgrade or Verify action" odznaczamy ptaszka przy "Verify after download" wybieramy przycisk "Choose.." wskazujemy wczesniej sciągnięty plik bootloadera, a następnie klikamy "Upgrade".
Proces trwa kilka sekund,po poprawnym zaktualizowaniu pojawi nam się zielony pasek z informacją że flash przebiegł pomyślnie.
Odpinamy płytkę od pc podpinamy i cieszymy się wgrywaniem softów w MP bez informacji o złym certyfikacie.
Pobieramy program :DFUse
następnie bootloader pod dfu :Bootloader
Następnie przed podpięciem płytki to komputera musimy zrobić chwilową zworkę na płycie w celu wprowadzenie jej w tryb DFU(najłatwiej chyba zrobić to pęsetą):
Następnie wpinamy kabel USB do komputera , uruchamiamy program DFUse , otowrzy się następujące okno :
Upewniamy się że w gornym lewym rogu mamy "STM device in DFu mode", jeśli nie to niedokładnie wykonaliśmy zworke.
Następnie jeśli udało nam się juz wprowadzić ją w tryb DFU, przechodzimy do dolnego panelu "Upgrade or Verify action" odznaczamy ptaszka przy "Verify after download" wybieramy przycisk "Choose.." wskazujemy wczesniej sciągnięty plik bootloadera, a następnie klikamy "Upgrade".
Proces trwa kilka sekund,po poprawnym zaktualizowaniu pojawi nam się zielony pasek z informacją że flash przebiegł pomyślnie.
Odpinamy płytkę od pc podpinamy i cieszymy się wgrywaniem softów w MP bez informacji o złym certyfikacie.

Dziś wgrałem nowego bootloadera do dwóch sterowników przez SERIAL 4/5 i DFUse - obie metody są skuteczne.
Radzę sprawdzić wszystkie lutowania gniazd DF13 - dziś wyjmując wtyczkę buzzera wyjąłem ją razem z gniazdem - urwał się jeden pad lutowniczy ale na szczęście nie pociągnął za sobą ścieżki ( oskrobanie ścieżki i kawałek kynarka załatwiło sprawę ).
Przy tej okazji poprawiłem wszystkie luty gniazd w dwóch sterownikach.
Zauważyłem również że wtyczki DF13 dostarczane np. z gps rc-timer różną się trochę od gniazd df13. ( boczne prowadnice są przez całą długość wtyczki i uchwyty są w innych miejscach )
Fota z poprawionymi lutami i naprawionym gniazdkiem.
Wyglądało to tak jakby brakło 1 min w piecu.

Radzę sprawdzić wszystkie lutowania gniazd DF13 - dziś wyjmując wtyczkę buzzera wyjąłem ją razem z gniazdem - urwał się jeden pad lutowniczy ale na szczęście nie pociągnął za sobą ścieżki ( oskrobanie ścieżki i kawałek kynarka załatwiło sprawę ).
Przy tej okazji poprawiłem wszystkie luty gniazd w dwóch sterownikach.
Zauważyłem również że wtyczki DF13 dostarczane np. z gps rc-timer różną się trochę od gniazd df13. ( boczne prowadnice są przez całą długość wtyczki i uchwyty są w innych miejscach )
Fota z poprawionymi lutami i naprawionym gniazdkiem.
Wyglądało to tak jakby brakło 1 min w piecu.
krzysztof
-> pixhawk <-
-> pixhawk <-