Po ustawieniu rate i expo lata tak samo bo to zmienia tylko prędkość z jaką kopter się kręci.
Lepiej jak najszybciej zacznij latać w acro, nawet w symulatorze (np. velocidrone).
Najlepiej byłoby ogarnąć pidy na nowo bo jednak doszła masa, ale żeby zrobić to dobrze trzeba umieć bo inaczej można tylko popsuć. Poza tym walkera to trochę słaby sprzęt. A poza tym rozmiar 110 + jakakolwiek dodatkowa masa to trochę słabo.
P.I.D.'y - o co kaman?
Moderatorzy: moderatorzy2014, moderatorzy
Re: P.I.D.'y - o co kaman?
Hangar: De Stik x2.5
ZOHD Dart na sterydach vmax 200km/h
Fristajlo (w bliskich planach)
ZOHD Dart na sterydach vmax 200km/h
Fristajlo (w bliskich planach)
Re: P.I.D.'y - o co kaman?
Przypinam ją też do f210, mam taki gimbal, co kiedyś kupiłem do symy, działa super, nie ma jello, a dron nie odczuwa w ogóle kamerki. Nie mogę tylko latać fpv, bo zasięgu mam 30m, idzie mi płytka z chin, zobaczymy, czy to ona uwalona.
Co do pidów, to nie będę ekstra ustawiał, tylko polatam spokojnie i potestuję.

Co do pidów, to nie będę ekstra ustawiał, tylko polatam spokojnie i potestuję.
No po zmianie tych rate'ów, zmiany latając w angle nie odczułem na prawym drążku w ogóle, tylko yaw się ustawił nieliniowo dokładnie jak w betaflight ustawiłem, wychodzi mi, że ustawia się to wspólnie dla wszystkich trybów lotu. Czułość pitch i roll dla angle zmieniłem tylko ustawieniem Angle Limit i strength zmieniłem na 30.Majk99 pisze:Po ustawieniu rate i expo lata tak samo bo to zmienia tylko prędkość z jaką kopter się kręci.
Walkera Rodeo 110 i F210
-
Damian12347
- Posty: 35
- Rejestracja: niedziela 10 sie 2014, 15:21
- Lokalizacja: Opole
Re: P.I.D.'y - o co kaman?
Witam kolegów.
Może temat nie pod koptery, ale tyczy się PID`ów. Nigdzie nie mogę znaleźć pomocy.
Posiadam łódkę zanętową APM 2.8, GPS M8N. HDOP 0,6 - 18 satelit.
Kompas skalibrowany idealnie, 6000 punktów.
Łódka wężykuje po wodzie podczas płynięcia do punktu.
Została mi jedynie zabawa z PID`ami. Zmieniłem P z lewego górnego rogu, zauważyłem że łódka idealnie zrobiła zwrot, po chwili znów zaczęła wężykować podczas płynięcia do punktu.
Mam nową wersję, w starej było mniej opcji. Może doradzi ktoś na który punkt dokładnie zwrócić uwagę?
Łódka posiada 2 silniki.

Jeśli nie w temat, proszę o usunięcie.
Pozdrawiam
Może temat nie pod koptery, ale tyczy się PID`ów. Nigdzie nie mogę znaleźć pomocy.
Posiadam łódkę zanętową APM 2.8, GPS M8N. HDOP 0,6 - 18 satelit.
Kompas skalibrowany idealnie, 6000 punktów.
Łódka wężykuje po wodzie podczas płynięcia do punktu.
Została mi jedynie zabawa z PID`ami. Zmieniłem P z lewego górnego rogu, zauważyłem że łódka idealnie zrobiła zwrot, po chwili znów zaczęła wężykować podczas płynięcia do punktu.
Mam nową wersję, w starej było mniej opcji. Może doradzi ktoś na który punkt dokładnie zwrócić uwagę?
Łódka posiada 2 silniki.
Jeśli nie w temat, proszę o usunięcie.
Pozdrawiam
Re: P.I.D.'y - o co kaman?
Damian12347, biorąc pod uwagę jak PIDy działają w dronach, to "wężykowanie" porównał bym do powolnych wibracji podczas lotu drona, a więc ja szukał bym problemu w za dużej wartości "P".
Jeśli jest za duże - przestrzeliwuje pozycję, nastepnie chce ją skorygować, ale znow za mocno i kółko sie zamyka.
Nie znam.się na łódkach ale od tego bym zaczął
Jeśli jest za duże - przestrzeliwuje pozycję, nastepnie chce ją skorygować, ale znow za mocno i kółko sie zamyka.
Nie znam.się na łódkach ale od tego bym zaczął

Re: P.I.D.'y - o co kaman?
Dokładnie tak się dzieje gdy są złe PIDy - oscylacje. Różnica między quadem a łódką jest jest w medium jakim jest woda. Powoduje ona że oscylacje są one bardzo spowolnione.kuczy pisze:Damian12347, biorąc pod uwagę jak PIDy działają w dronach, to "wężykowanie" porównał bym do powolnych wibracji podczas lotu drona, a więc ja szukał bym problemu w za dużej wartości "P".
Jeśli jest za duże - przestrzeliwuje pozycję, nastepnie chce ją skorygować, ale znow za mocno i kółko sie zamyka.
Nie znam.się na łódkach ale od tego bym zaczął
Zmniejsz P - będzie mniej proporcjonalnej dużej reakcji. Albo zwiększ D - dodasz tłumienia.
Pozdrawiam,
Przemek
Przemek
Re: P.I.D.'y - o co kaman?
Ale z kolei przegniesz z D, to mogą się pojawic się szybkie wibracje :)
-
Damian12347
- Posty: 35
- Rejestracja: niedziela 10 sie 2014, 15:21
- Lokalizacja: Opole
Re: P.I.D.'y - o co kaman?
Dzięki wielkie za odpowiedź koledzy :)
Szczerze mówiąc nie miałem wcześniej styczności z APM, jakoś to ogarnąłem z pomocą maxiii - temat o APM 2.8 do łodzi. Wszystko i nic w temacie po przewertowaniu 15 stron.
Jak praktycznie ma się parametr P do D?
Jak pisałem zmniejszyłem ostatnio z 1.8 do 1.4 i zaraz było widać poprawę. Mogę zmniejszyć jeszcze do mniejszej wartości. Jeśli nie pomoże to jak mogę ratować się jeszcze parametrem D?
W teorii wszystko opisane na pierwszej stronie postu, w praktyce - jak radzić sobie z tym nad wodą?
Na pewno metoda prób i błędow + jakaś wiedza praktyczna użytkowników.
Podpowiecie?
Szczerze mówiąc nie miałem wcześniej styczności z APM, jakoś to ogarnąłem z pomocą maxiii - temat o APM 2.8 do łodzi. Wszystko i nic w temacie po przewertowaniu 15 stron.
Jak praktycznie ma się parametr P do D?
Jak pisałem zmniejszyłem ostatnio z 1.8 do 1.4 i zaraz było widać poprawę. Mogę zmniejszyć jeszcze do mniejszej wartości. Jeśli nie pomoże to jak mogę ratować się jeszcze parametrem D?
W teorii wszystko opisane na pierwszej stronie postu, w praktyce - jak radzić sobie z tym nad wodą?
Na pewno metoda prób i błędow + jakaś wiedza praktyczna użytkowników.
Podpowiecie?
Re: P.I.D.'y - o co kaman?
Jak jest obecnie z PID-ami w quadach 5" na BF ? Zauważyłem na różnych filmach na yotube, że często parametry urosły w stosunku do starszych ustawień.
Borykam się sam ostatnio z problemem wibracji/zgrzytaniu silników przy znacznym przyśpieszaniu quada 5" na DRC FLOW, ale tylko z założonym GOPRO 7 w ramce. To jest jakby wibracje/zgrzytanie silników przy szybkim zwiększaniu throtle . Bez Go PRO quad startuje szybko do góry i nie ma tego zjawiska. Staram się to wyeliminować zmieniając PID-y wg. instrukcji dostępnych w sieci, ale słabo mi to wychodzi. Mam obecnie śmigła 51-45 DAL pro . Przy powolnym przyśpieszaniu z Gopro quad normalnie wznosi się płynnie i nie ma nic niepokojącego. Co to za zjawisko i jak to wyeliminować?
Borykam się sam ostatnio z problemem wibracji/zgrzytaniu silników przy znacznym przyśpieszaniu quada 5" na DRC FLOW, ale tylko z założonym GOPRO 7 w ramce. To jest jakby wibracje/zgrzytanie silników przy szybkim zwiększaniu throtle . Bez Go PRO quad startuje szybko do góry i nie ma tego zjawiska. Staram się to wyeliminować zmieniając PID-y wg. instrukcji dostępnych w sieci, ale słabo mi to wychodzi. Mam obecnie śmigła 51-45 DAL pro . Przy powolnym przyśpieszaniu z Gopro quad normalnie wznosi się płynnie i nie ma nic niepokojącego. Co to za zjawisko i jak to wyeliminować?
Re: P.I.D.'y - o co kaman?
Zapomnij o wartościach. Pidy ustawiasz aby było dobrze a nie 'bo kolega ma P: 50, to ja tez'.debu85 pisze:Zauważyłem na różnych filmach na yotube, że często parametry urosły w stosunku do starszych ustawień.
Co do BF nie będę się wymadrzal. Nagraj film z zachowaniem quada bez oraz z GOPRo.
Wcale mnie nie dziwi, że jak bez kamery dziala spoko, to po dolozeniu takiego kloca masz problemy.
Pidy powienienes zmieniać w zależności od obciążenia quada. (Podejrzewam, ze przez smart audio, tak jak większość racerowcow)
Re: P.I.D.'y - o co kaman?
Dzięki za podpowiedź, postaram się to nagrać, ale czy jest może jakaś zasada odnośnie PID-owania w przypadku gdy dokładamy obciążenie w postaci GoPro itp ? , tzn. co w PID-ach najczęściej powinniśmy podnieść lub co zmniejszyć w wartościach PID lub może w filtrach ? Czy można w przybliżeniu z doświadczenia to jakość wywnioskować, czy każdy przypadek jest inny i bez próbowania się nie obejdzie ? Czy najzwyczajniej , jest zbyt dużo czynników wpływających na takie zachowanie i nie da się tego tak po prostu opisać.kuczy pisze:Zapomnij o wartościach. Pidy ustawiasz aby było dobrze a nie 'bo kolega ma P: 50, to ja tez'.debu85 pisze:Zauważyłem na różnych filmach na yotube, że często parametry urosły w stosunku do starszych ustawień.
Co do BF nie będę się wymadrzal. Nagraj film z zachowaniem quada bez oraz z GOPRo.
Wcale mnie nie dziwi, że jak bez kamery dziala spoko, to po dolozeniu takiego kloca masz problemy.
Pidy powienienes zmieniać w zależności od obciążenia quada. (Podejrzewam, ze przez smart audio, tak jak większość racerowcow)
Tak, PID-y zmieniam przez smart audio.
Re: P.I.D.'y - o co kaman?
Panowie Help bo oszaleję!!!
Posiadam łódkę typu katamaran (dwa silniki). Apm + zew.gps przeszczepione z poprzedniej łódki, w której wszystko działało ok. Problem polega na tym, że łódka dopływa do punktu ale nie po linii prostej tylko sporym łukiem (załączam ilustrację)
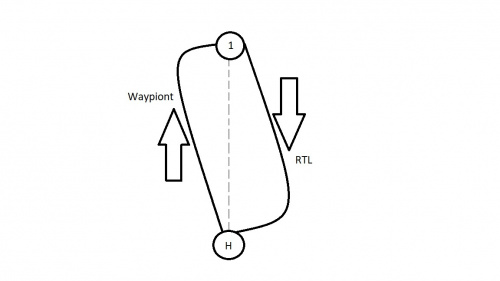
Przypuszczam, że problem wynika z tego, że łódka ma tendencje do skręcania a lewo. Przy normalnym pływaniu w aparaturze wystarczy wytrymować i jest ok ale apm coś sobie z tym nie radzi. Ten sam układ w poprzedniej łódce płynął jak po sznurku.
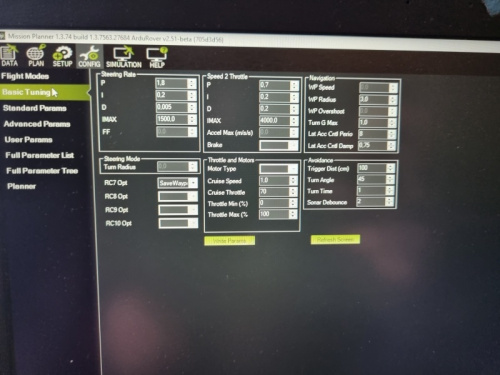
Przypuszczam że jest możliwość zmienić któryś parametr ale metoda prób i błędów nie zadziałała. Poniżej moje ustawienia. Bardzo proszę o podpowiedź!
Posiadam łódkę typu katamaran (dwa silniki). Apm + zew.gps przeszczepione z poprzedniej łódki, w której wszystko działało ok. Problem polega na tym, że łódka dopływa do punktu ale nie po linii prostej tylko sporym łukiem (załączam ilustrację)
Przypuszczam, że problem wynika z tego, że łódka ma tendencje do skręcania a lewo. Przy normalnym pływaniu w aparaturze wystarczy wytrymować i jest ok ale apm coś sobie z tym nie radzi. Ten sam układ w poprzedniej łódce płynął jak po sznurku.
Przypuszczam że jest możliwość zmienić któryś parametr ale metoda prób i błędów nie zadziałała. Poniżej moje ustawienia. Bardzo proszę o podpowiedź!
Re: P.I.D.'y - o co kaman?
Po pierwsze to takich rzeczy nie trymuje sie w aparaturze, lodka ma mechanicznie byc tak ustawiona zeby plywala bez tendencji do skrecania.
Po drugie poprawnie zorientowac i skalibrowac kompas.
Po drugie poprawnie zorientowac i skalibrowac kompas.
Re: P.I.D.'y - o co kaman?
Kompas i akcelerometr kalibrowałem wielokrotnie. Łódka poprawnie wskazuje kierunek. Nie bardzo wiem jak mam ustawić łódkę mechanicznie. Przy dwóch silnikach nawet najmniejsza różnica w prędkości obrotowej lub np. minimalna różnica w kształcie śruby sprawia że model nie trzyma idealnie kierunku. Nie mam wpływu na korekcję poza trymem w aparaturze.
Re: P.I.D.'y - o co kaman?
Kalibracja to jedno, prawidlowa orientacja obu to drugie. Lodka powinna wskazywac poprawny kierunek w kazdej pozycji (niezaleznie od tego jak jest przechylona - nawet na plecach).dredas pisze:Kompas i akcelerometr kalibrowałem wielokrotnie.
Tak zeby kontroler nie musial korygowac mechanicznych niedoskonalosci. Jak widzisz radzi sobie z tym, ostatecznie doplywa do celu, ale niepotrzebnie musi "walczyc". To jak masz lodke wypidowana rowniez wplynie na to jak sprawnie bedzie "walczyl" (na temat PIDowania tutoriali w internecie sa setki).dredas pisze:Nie bardzo wiem jak mam ustawić łódkę mechanicznie.
Przy jednakowo skalibrowanych ESC nie bedziesz mial roznicy w predkosci obrotowej silnikow. Minimalne roznice w ksztalcie srub mozesz pominac.dredas pisze:Przy dwóch silnikach nawet najmniejsza różnica w prędkości obrotowej lub np. minimalna różnica w kształcie śruby sprawia że model nie trzyma idealnie kierunku.
-
grzechotek
- Posty: 75
- Rejestracja: środa 27 mar 2019, 11:45
Re: P.I.D.'y - o co kaman?
Jak będzie się zachowywał dron jak D będzie zbyt duże ? Mam Kiss'a i tam wartości dla Roll i Pitch jest 10, ja żeby pozbyć się propwash muszę podkręcić je aż do prawie 30. Przy tej wartości 30 propwash mam tylko przy bardzo ekstremalnych sytuacjach. Wiem, że przy wysokim D silniki będą gorące a u mnie są zimne.