Jest to mój pierwszy post na forum, poza przywitalnym oczywiście :)
Modelami i lataniem RC zaraził mnie kumpel, z którym 10 lat temu lataliśmy cessną VLOS. Następnie będąc na studiach udało mi się zakupić arduino i po kilku projektach wymyśliłem, żeby zbudować quadcopter na podstawie z arduino. Jak to po studencku, zaczęło się tanim kosztem. W ruch poszło Ali i zamówienia z chin, do tego najtańszy nadajnik i odbiornik RC plus dodatkowe moduły do arduino. Pierwsze próby oczywiście skończyły się fiaskiem z powodu braku porządnej ramy, odpowiednich narzędzi, miejsca i czasu. Po roku czy 2-ch zakupiłem ramę, odpowiedni shield do arduino i poskładałem quada na nowo, wgrałem nowy kod i o dziwo udało mi się wzbić w powietrze. Oczywiście przed tym lotem szkoliłem się małymi dronami/zabawkami oraz latałem na symulatorze, żeby nie zrobić sobie lub innym krzywdy czy też nie stworzyć niebezpieczeństwa.
Oto podzespoły z jakich stworzyłem moje latadło:
- rama: PCB S500
- nadajnik: FlySky FS-CT6B
- odbiornik: FlySky FS-R6B
- ESC: XXD HW30A
- silniki: XXD A2212 1000KV
- śmigła: 1045
- bateria: TCB 3500mAh 3S 11.1V
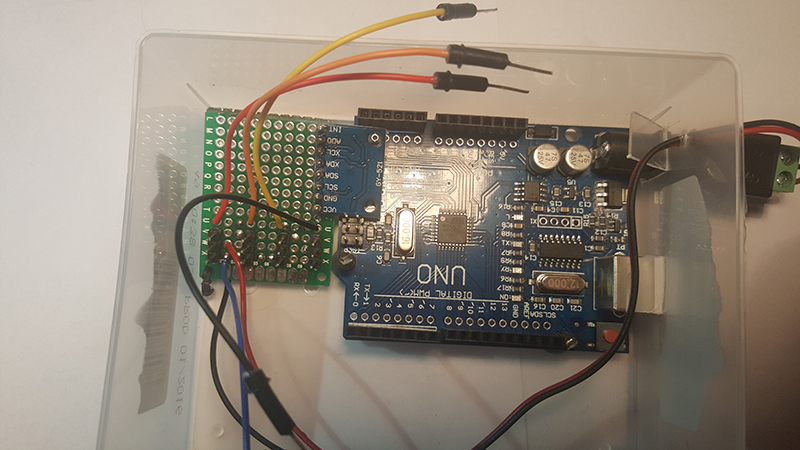
- kontroler lotu: ArduinoUNO + MPU6050 + Shield
Wszystko złożone wg instrukcji z tej strony: http://www.brokking.net/ymfc-al_main.html
Latanie tym cudem nie było najprostsze, prawdopodobnie spowodowane to było zbyt dużymi wibracjami oraz problemem ze strojeniem PID, niemniej podwiesiłem do niego telefon i odbyłem kilka lotów z nagrywaniem na uboczu. Oczywiście nie obyło się bez kilku spektakularnych kretów, począwszy od wypiętej baterii, poluzowanej piasty na ataku ptaka kończąc. Tak więc zamówione zostały dodatkowe ramiona oraz zapas śmigieł. Kruche nogi quada sklejam sam :)
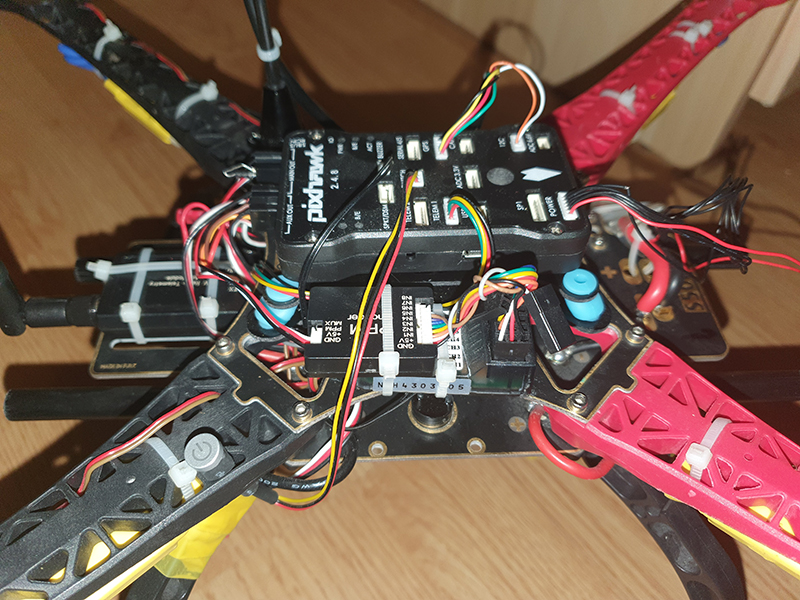
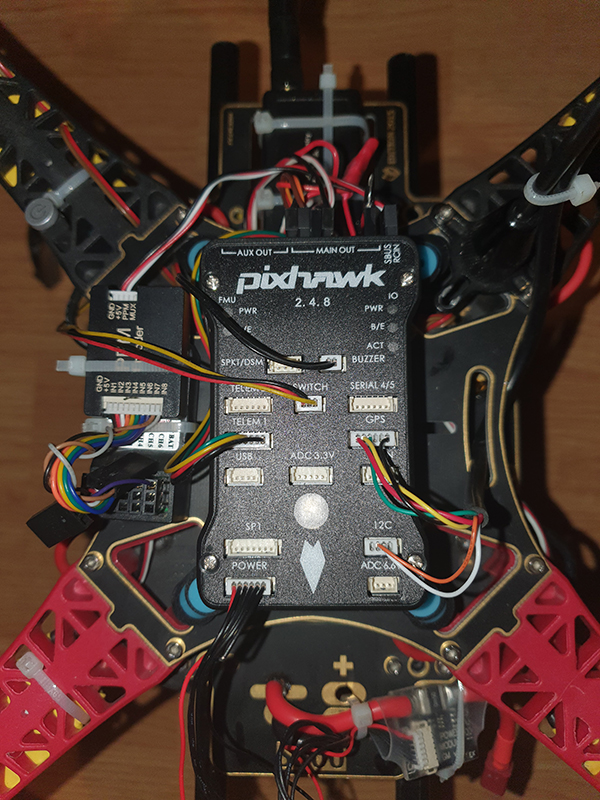
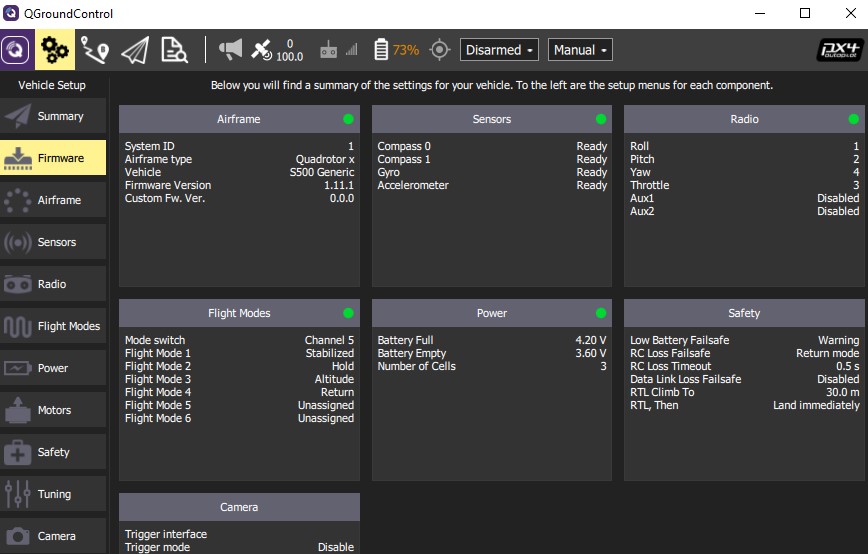
Po problemach ze strojeniem PID oraz chęcią stworzenia czegoś, czym mógłbym polatać po ukończeniu kursu UAVO BVLOS zakupiłem na chinach klona PIXHAWK:
- kontroler: Pixhawk 2.4.8 32bit 2MB
- telemetria: 433MHz 100mw
- enkoder PPM
- GPS: M8N + uchwyt
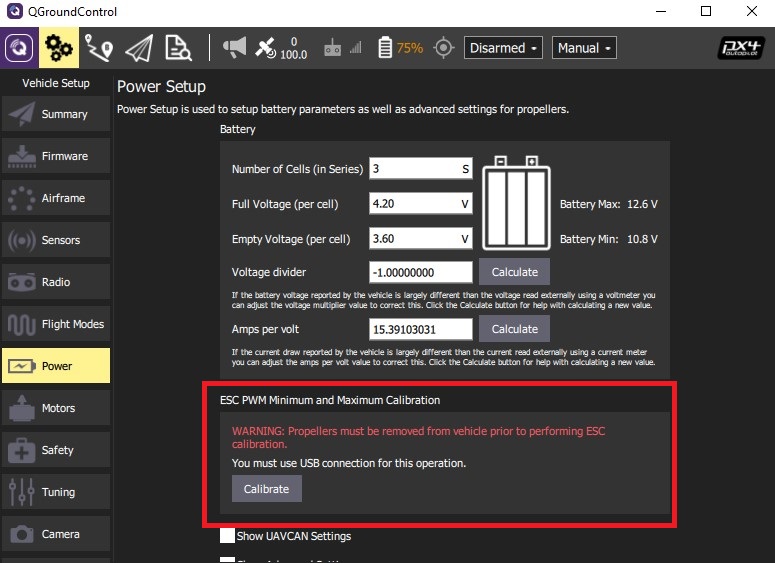
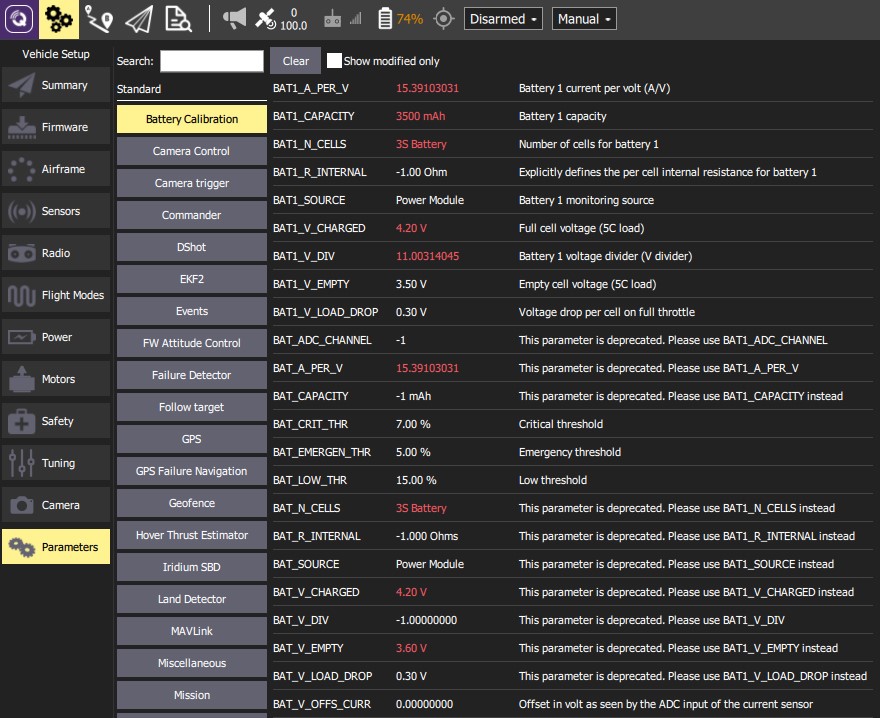
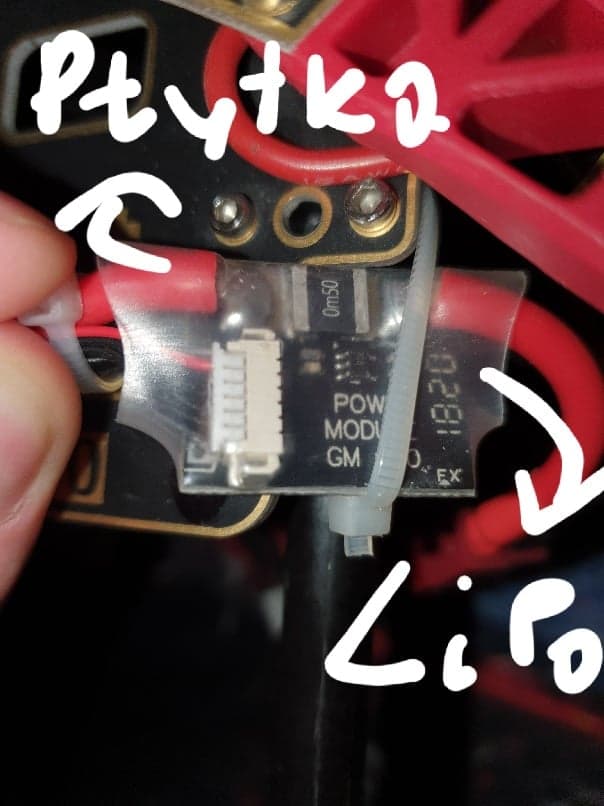
- moduł zasilania: PowerModule GM v1.0
Lecz po złożeniu całego zestawu borykam się z problemami, nie udało mi się jeszcze nim polecieć. A po pół roku szukania rozwiązania, zamówieniu nowego ESC i nowego silnika dalej nie daję rady oderwać się od ziemi.
Może ktoś z was będzie miał pomysł co może powodować moje problemy.
Poniżej kilka zdjęć prototypu, oraz już gotowego quada: