
Kaplasek - nie przykładałem tylko robiłem kółka we wszystkich płaszczyznach.
Loki - niestety w obu moich Pixhawk'ach offsety w 2 kompasie bardzo znacznie odbiegają od siebie. Ale faktycznie tylko w jednym jest tak wysoka wartość w osi Z bo w drugim jest 393, i tam MP nie wykazuje błędu.
Musze chyba uporządkować kable (czyli odsunąć) spod Pixa.
Dzięki za sugestie.
Pixhawk dziwny przypadek
Moderatorzy: moderatorzy2014, moderatorzy
Koledzy, z całym szacunkiem ale i przed i po machaniu magnesem odczyty były i są identyczne więc nie ma mowy o namagnesowaniu go. Zresztą zrobiłem to i z drugim magnetometrem tym z Francji i tam odczyty były i są małe. Tak więc machanie małym magnesem stałym w odległości kilku cm. od kompasu nie przynosi żadnych skutków ani negatywnych a ani pozytywnych.
Ale dziękuję za radę i postaram się poszukać jakiegoś elektromagnesu, ale na razie muszę poczytać na forum co będzie się do tego nadawało.
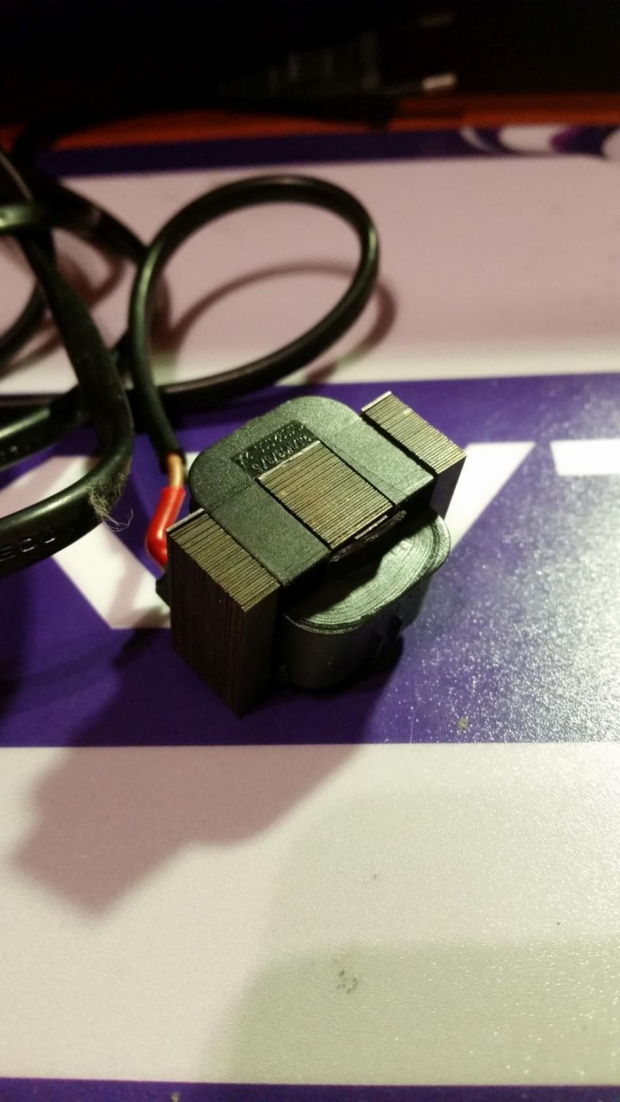
Przy okazji Szychor, znalazłem ładowarkę do starego telefonu. Jest tam transformatorek wielkości mojego paznokcia. Czy cóś takiego się nada. A może zrobisz zdjęcie swojego demagnetyzera z transformatorka do Nokii ?
Ale dziękuję za radę i postaram się poszukać jakiegoś elektromagnesu, ale na razie muszę poczytać na forum co będzie się do tego nadawało.
Przy okazji Szychor, znalazłem ładowarkę do starego telefonu. Jest tam transformatorek wielkości mojego paznokcia. Czy cóś takiego się nada. A może zrobisz zdjęcie swojego demagnetyzera z transformatorka do Nokii ?
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
MOj demagnetyzer jest z łądowarki od nokii 3310 , odwinąłem uzwojenie od strony 5v zostalo od strony 220v. W pixhawku magnetometr jest razem z akcelerometrem w jednycm chipie. znajduje się on w lewym rogu. Sam testowałem i na 100% przyłożenie magnesu stałego do chipa powoduje namagnesowanie go . U mnie po takim teście offsety były na pozniomie 800-1000, po zdemagnesowaniu wróciły do wartości 15-30. Jests takie cos jak residual magnetization co wlasnie powoduje wysokie wartości offsetow, swoją drogą efekt taki może być spowodowany namagnesowaną śrubką od obudowy.
Residual magnetization
Residual magnetization
To jeszcze dla pewności, czy rozmagnesowujesz samą cewką czy zostawiłeś ją na otwartym z jednej strony rdzeniu z blachy transformatorowej ?. Oraz czy wykonujesz jakieś okrężne ruchy na około Pixhawka oraz GPS'a ?.
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
Wielkie dzięki, myślę, że nie tylko mnie pomogłeś. Jutro zabieram się do "rozwalania" transformatora. Trzeba będzie przeszukać złomowisko. A jak nie znajdę to kupię jakiś mały nowy.
Pozdrawiam
Pozdrawiam
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
Wczoraj po całej operacji ponownej instalacji oprogramowania do Hexy poszedłem na dwór. Pierwsze podpięcie, wszystko OK żółte błyski, czerwono niebieskie, niebieskie i po chwili zielone. Hexa lata jak trzeba. Sprawdzenie trybów lotu z przełącznika, jest OK. Lądowanie i rozłączeniu pakietu a po chwili podłączenie i niespodzianka, 2 żółte i już nic tego nie zmieni, ani kolejne podłączenia ani ruchy copterem. A najlepsze jest to,że po powrocie do domu po chwili podłączam pakiet i znowu wszystko jest OK. Dioda spokojnie "dochodzi do niebieskiego". Nie wiem czy takie coś występuje tylko u mnie, ale mam tak samo na dwóch Pixhawkach i to po instalacji ver. 3.2 Wcześniej tego nie zauważyłem, ale nie było też tak niskich temperatur. Latałem przy około 10 stopniach C a ostatnio na ver. 3.2 temperatury były około zera do minus 5 stopni C. Może tu jest coś nie tak w nowym oprogramowaniu.
Jak rozmagnesuję kompasy i nadal będzie to samo to dla sprawdzenia zainstaluję ver. 3.1.4 bo nie ma udostępnionej (jeszcze) 3.1.5 Ale to plan działania i wolałbym aby nie był potrzebny.
Ale operacji powrotu dokonam po przyjściu modemów (powinny już niedługo dotrzeć bo parę dni temu opuściły HongKong) do telemetrii, lub kabelka OTG do mojego tabletu, bo przynajmniej będę pewny co jest przyczyną błędu przez który nie można uzbroić silników.
Jak rozmagnesuję kompasy i nadal będzie to samo to dla sprawdzenia zainstaluję ver. 3.1.4 bo nie ma udostępnionej (jeszcze) 3.1.5 Ale to plan działania i wolałbym aby nie był potrzebny.
Ale operacji powrotu dokonam po przyjściu modemów (powinny już niedługo dotrzeć bo parę dni temu opuściły HongKong) do telemetrii, lub kabelka OTG do mojego tabletu, bo przynajmniej będę pewny co jest przyczyną błędu przez który nie można uzbroić silników.
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka


Ale ja aż taki mądry w te klocki nie jestem, podpowiedz proszę jak to zrobić, albo poczytam instrukcję. Pewnie dojdę i do tego.shaggee pisze: ...............
Albo włącz logi nie od uzbrojenia a od uruchomienia pixhawka. Wszystkiego się dowiesz
Szychor - dźwięków brak, po prostu sobie mruga i tyle.
A teraz relacja z pola bitwy.
Kupiłem małe gów....ko za 20 zł i ponad 2 godziny pastwiłem się nad tym. Oj paskudna praca,a im to mniejsze tym trudniej rozebrać, ale jest.
Zrobiłem demagnetyzację czyli przejechałem kompasem tam i spowrotem nad elektromagnesem. No był spadek ale tylko o kilka jednostek. Postanowiłem więc zrobić bliżej, dłużej i robiąc kółka we wszystkich płaszczyznach. I rezultat jest pozytywny. Jak przedtem było: X:-172.00, Y:-41.00, Z:152.00 to teraz jest: X:-126 Y: -36 Z:57
Natomiast w Pixhawku było:X:149 Y:152Z: -669 a jest X:87 Y:-118 Z:437 i tu będzie trzeba także dłużej się pobawić ale za jakiś czas bo transformatorek zaczął mocno grzać w palce.
Także dzięki za poradę, może coś z tego będzie.
EDIT:
Byłem na dworze. Temperatura - 5 st.C Pierwsze podłączenie baterii i wszystko OK. Po minucie wylądowałem, odłączyłem zasilanie i niestety 2 żółte. Po podłączeniu do laptopa: Bad Accel Health. I już nie można nic zrobić. Przychodze do domu podłączam ta samą baterię i niebieska sobie spokojnie mruga ile razy bym nie podłączył. Powoli tracę cierpliwość..............
Zaczynam czytać instrukcję po raz .....
EDIT:
Niestety nie znalazłem gdzie można włączyć aby logi były zapisywane od chwili włączenia zasilania. A by się przydało. Jak ktoś podpowie to będę wdzięczny.
Po kilku próbach rozmagnesowania kompasu w Pixhawku udało mi się zejść do następujących wartości: X:27 Y:-178 Z:351 W logach nie ma już infa o błędzie, czyli można przyjąć, że z tym się uporałem. Jeszcze raz dziękuję za pomoc i proszę o wyrozumiałość.
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
Logi włącza się w mission plannerze poprzez terminal lub w zakłądce config tuning --> standard parameters i szukasz Log Bitmask(LOG_BITMASK) i tam masz do wybory które logi chcesz włączyć.
Polecam używac logow w celach diagnostycznych bardzo wiele można się z nich dowiedzieć o stanie naszego koptera. Jeśli nie będziemy kożystać z logów warto je wyłączyć bo to odciąży procesor.
Polecam używac logow w celach diagnostycznych bardzo wiele można się z nich dowiedzieć o stanie naszego koptera. Jeśli nie będziemy kożystać z logów warto je wyłączyć bo to odciąży procesor.
Do tego doszedłem, ale nie o to mi chodziło. Zapis logów standardowo zaczyna się z chwilą uzbrojenia silników, ale Shaggee podpowiedział żebym zmienił to aby zapis zaczynał się z chwilą podłączenia zasilania. I właśnie takiej opcji nie mogę znaleźć, a to pokazałoby co blokuje pre-arm.Szychor pisze:Logi włącza się w mission plannerze poprzez terminal lub w zakłądce config tuning --> standard parameters i szukasz Log Bitmask(LOG_BITMASK) i tam masz do wybory które logi chcesz włączyć. ..................
Pozdrawiam
1.Tarot 680 - Pixhawk SunnySky V3508 580kV Afro Slim 20A APC 12*4,5 MR X8R Sony QX100
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka
2. Mi Drone 4K całkiem fajna latająca kamerka.
3. DJI Mavic 2 Pro super zabawka