
CX-20 Auto Pathfinder GPS - Quadcopter
Moderatorzy: Adrián, breweryhills, moderatorzy2014, moderatorzy
Witam
Nadal męczy mnie problem lichego zasięgu mojego CX-20 na 90% jestem przekonany że to wina oprogramowania a konkretnie ustawień fabrycznych - konkretnie po połączeniu się z modelem programem S8_Assistant ( bigflyshark ) otrzymuje wgląd w parametry a te konkretnie są ustawione 100/20m zmieniam je na np. 200/200m i tu zaczyna się problem z którym nie umie sobie poradzić a mianowicie nie ma opcji jak i możliwości zapisania ustawień non stop wraca do 100/20m. Bardzo będę wdzięczny jeżeli ktoś coś mi podpowie w tym temacie, może istnieją inne programy umożliwiające zarządzanie sharkX8_SLH. Próbowałem również upgradować firmware ( w nowej wersji 137 jest limit ustawiony na 1000m jednak prócz setek komunikatów "upgrade failed" nic nowego do sprawy nie wniosłem :/
- konkretnie po połączeniu się z modelem programem S8_Assistant ( bigflyshark ) otrzymuje wgląd w parametry a te konkretnie są ustawione 100/20m zmieniam je na np. 200/200m i tu zaczyna się problem z którym nie umie sobie poradzić a mianowicie nie ma opcji jak i możliwości zapisania ustawień non stop wraca do 100/20m. Bardzo będę wdzięczny jeżeli ktoś coś mi podpowie w tym temacie, może istnieją inne programy umożliwiające zarządzanie sharkX8_SLH. Próbowałem również upgradować firmware ( w nowej wersji 137 jest limit ustawiony na 1000m jednak prócz setek komunikatów "upgrade failed" nic nowego do sprawy nie wniosłem :/
Pozdrawiam
Nadal męczy mnie problem lichego zasięgu mojego CX-20 na 90% jestem przekonany że to wina oprogramowania a konkretnie ustawień fabrycznych
Pozdrawiam

Może głupio spytam ale czy jak się podłączysz pod komputer w prawym górnym rogu pokazuje Ci nr twojego urządzenia ?
I teraz przestroga dla wszystkich:
W instrukcji jest napisane żeby nie latać jak wieje ponad 4m/s
Dziś poleciałem wiatr przy ziemi słaby ale na wysokości 12 m ( na takiej mam czujnik) było około 7m/s Model poleciał na jakieś 100m i tam sobie ostro wiało na tyle że zniosło model ponad 800M dopiero wyłączenie aparatury spowodowało próbę powrotu zabrakło około 30-40 sekund na wylądowanie. Model naprawdę bardzo ostro walczył z wiatrem niestety poległ .Czekamy na nową ramę.
I teraz przestroga dla wszystkich:
W instrukcji jest napisane żeby nie latać jak wieje ponad 4m/s
Dziś poleciałem wiatr przy ziemi słaby ale na wysokości 12 m ( na takiej mam czujnik) było około 7m/s Model poleciał na jakieś 100m i tam sobie ostro wiało na tyle że zniosło model ponad 800M dopiero wyłączenie aparatury spowodowało próbę powrotu
Żyję tak, jak by dziś był ostatni dzień mojego życia, jest ono zbyt krótkie aby sobie czego kolwiek odmawiać.
Witam
GROM żadne pytanie nie jest głupie ! co do mojego podłączania to myślę że jest OK podaje w prawym rogu numer qoptera a w pozostałych zakładkach wszelkie dane takie jak wersje oprogramowania, napięcie w baterii, wychylenia drążków, przebieg, itd. etc. itp.. Korzystając z okazji zapytam na jakich ustawieniach SWB - SWA udaje Ci się uzyskać największy zasięg ? jaki masz max na SWB -0 SWA -0.
P.S Dziś w moim CX-20 po zaktualizowaniu firmware ( po kolejnej próbie z innego komputera ) do v.137 i ustawieniu SW0 -2 SWA -2 qopter po około 800 m całkowicie bez kontrolowanego lotu ( nie wiedzieć czemu nie załączyło się "go to home" mimo wywoływania z kontrolera ) wpadł w wielkiego dęba czego skutkiem są poniższe obrażenia :

Udało mi się biedaka reanimować lecz wygląda na to że GPS padł ( nie łapie fixa ) tu też pytanie do wyjadaczy : cóż począć ?
GROM żadne pytanie nie jest głupie ! co do mojego podłączania to myślę że jest OK podaje w prawym rogu numer qoptera a w pozostałych zakładkach wszelkie dane takie jak wersje oprogramowania, napięcie w baterii, wychylenia drążków, przebieg, itd. etc. itp.. Korzystając z okazji zapytam na jakich ustawieniach SWB - SWA udaje Ci się uzyskać największy zasięg ? jaki masz max na SWB -0 SWA -0.
P.S Dziś w moim CX-20 po zaktualizowaniu firmware ( po kolejnej próbie z innego komputera ) do v.137 i ustawieniu SW0 -2 SWA -2 qopter po około 800 m całkowicie bez kontrolowanego lotu ( nie wiedzieć czemu nie załączyło się "go to home" mimo wywoływania z kontrolera ) wpadł w wielkiego dęba czego skutkiem są poniższe obrażenia :
Udało mi się biedaka reanimować lecz wygląda na to że GPS padł ( nie łapie fixa ) tu też pytanie do wyjadaczy : cóż począć ?
No to mamy identyczny problem mój po nowym sofcie strata powrotu zaczął wracać po wyłączeniu aparatury ( rozkręciłem GPS i okazało się że odpadł układ GPS od płytki ) zakładam że to przez mróz i drgania.
Z Twojej fotki widzę że jednam mamy inne wersje (inny moduł GPS)
I CZY ROBIŁEŚ KALIBRACJĘ PO ZMIANIE SOFTU ??? bo ja nie

Jedyne czego mi szkoda to to że jakimś złym trafem nie uruchomiłem kamerki bo sam lot był bardzo długi 13 minut i bardzo wysoko, i ten wspaniały "kret" żal że tego nie nagrałem.
Tak na przyszłość elektronika zwariowała przy poziomie 9,6V ( może ktoś ma podobne spostrzeżenia) niestety ja ustawiłem lądowanie przymusowe na 9,9V ( i tak to zabrakło mocy)
Z Twojej fotki widzę że jednam mamy inne wersje (inny moduł GPS)
I CZY ROBIŁEŚ KALIBRACJĘ PO ZMIANIE SOFTU ??? bo ja nie
Jedyne czego mi szkoda to to że jakimś złym trafem nie uruchomiłem kamerki bo sam lot był bardzo długi 13 minut i bardzo wysoko, i ten wspaniały "kret" żal że tego nie nagrałem.
Tak na przyszłość elektronika zwariowała przy poziomie 9,6V ( może ktoś ma podobne spostrzeżenia) niestety ja ustawiłem lądowanie przymusowe na 9,9V ( i tak to zabrakło mocy)
Ostatnio zmieniony sobota 29 lis 2014, 22:15 przez grom, łącznie zmieniany 3 razy.
Żyję tak, jak by dziś był ostatni dzień mojego życia, jest ono zbyt krótkie aby sobie czego kolwiek odmawiać.
Obejrzyj dokładnie moduł pod lupą czy nie puścił gdzieś lut w GPS ( ja dopiero w Poniedziałek do elektronika jadę bo sam nie mam tak dokładnej lutownicy) Zła wiadomość to taka że jak padł moduł to ja od kilku godzin szukam i nie mogę znaleźć takiego samego . Zamawiasz nową ramę czy przerabiasz na coś fajnego ?
Ja swojego kupiłem tylko dla elektroniki bo samego Sharka praktycznie nikt nie sprzedaje, a rama jedna idzie taka:

I chyba zamówię od razu tą:

Ja swojego kupiłem tylko dla elektroniki bo samego Sharka praktycznie nikt nie sprzedaje, a rama jedna idzie taka:
I chyba zamówię od razu tą:
Żyję tak, jak by dziś był ostatni dzień mojego życia, jest ono zbyt krótkie aby sobie czego kolwiek odmawiać.
Właśnie się zastanawiam co dalej wpierw myślałem że tanim kosztem poskładam CX-a i zrobiłem tak :grom pisze: Zamawiasz nową ramę czy przerabiasz na coś fajnego ?

+

=

wszystko wyszło w miarę ładnie i sprawnie lecz okazało się że GPS jest prawdopodobnie walnięty :( teraz myślę przełożyć graty na nową ramę bądź od podstaw coś na nowej ramie sklecić ( myślę nad ramą DJI F450 ). Zastanawiałem się także nad phantomem ale jeżeli z nim mają też być takie jaja jak z CX-20 ( tj. nie wiadomo o co chodzi ;) ) to ja dziękuje za takie wczasy.
Ja planuje przekładkę swojego z ramy zrobionej przez założyciela wątku (od niego odkupiłem copter) do ori obudowy. Wiec jak chcesz mogę sprzedać Ci gotowca. jak coś to PM.
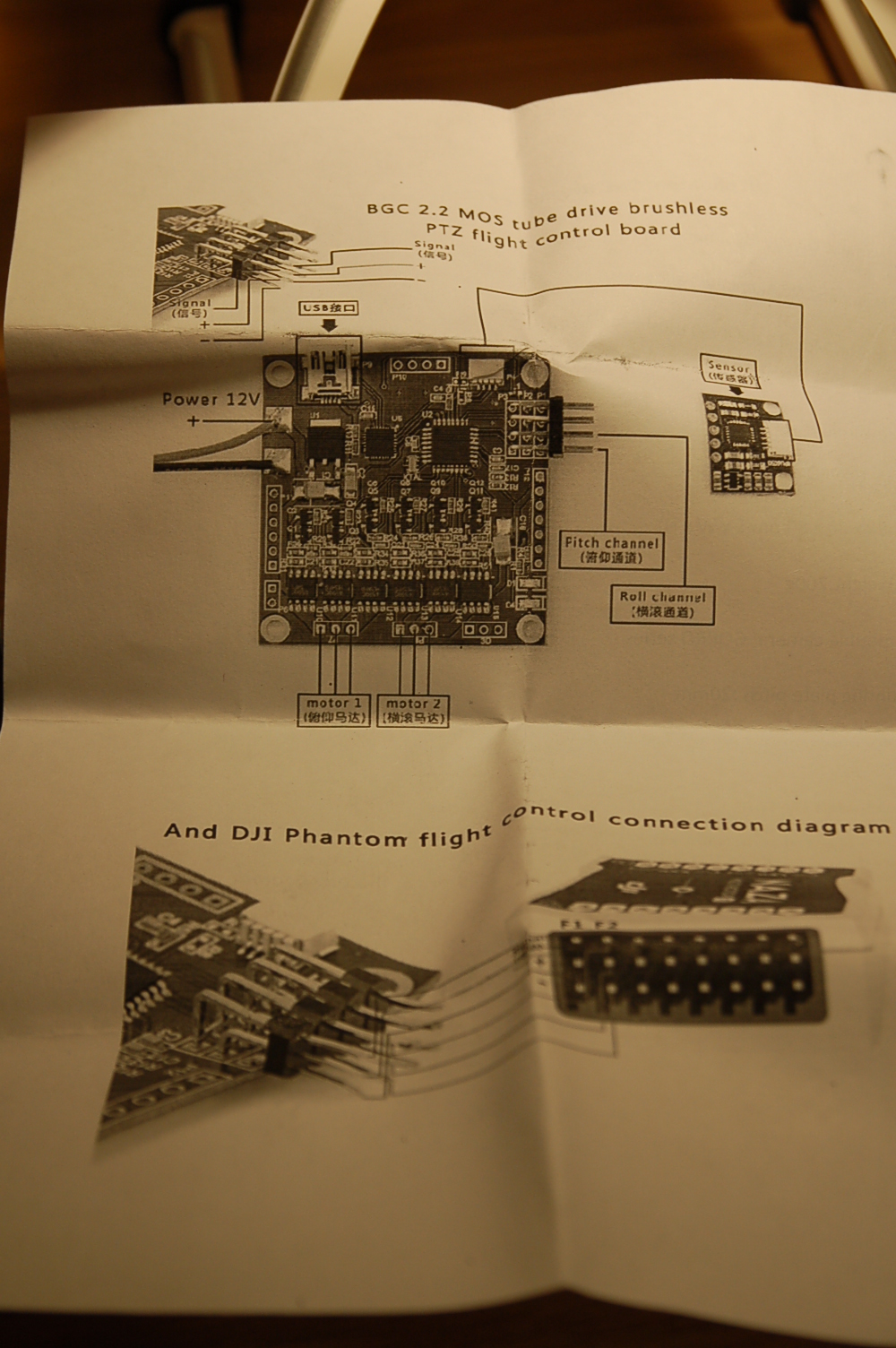
A teraz pytanie odemnie. Zakupiłem gimbal na bg i chciał bym się dopytać jak go podłączyć by mieć możliwość regulacji kamery góra dół z apki. Z tego co już się dowiedziałem muszę podłączyć piny gimbala oznaczone jako pitch do kanału 2 na odbiorniku tylko moje pytanie jak idą piny w odbiorniku + - i sygnał. W instrukcji mam tylko schemat do nazy ale nie wiele mi mówi
Tak to wygląda:

A teraz pytanie odemnie. Zakupiłem gimbal na bg i chciał bym się dopytać jak go podłączyć by mieć możliwość regulacji kamery góra dół z apki. Z tego co już się dowiedziałem muszę podłączyć piny gimbala oznaczone jako pitch do kanału 2 na odbiorniku tylko moje pytanie jak idą piny w odbiorniku + - i sygnał. W instrukcji mam tylko schemat do nazy ale nie wiele mi mówi
Tak to wygląda:
Wracając do mojego pytania sprawa już rozwiązana.
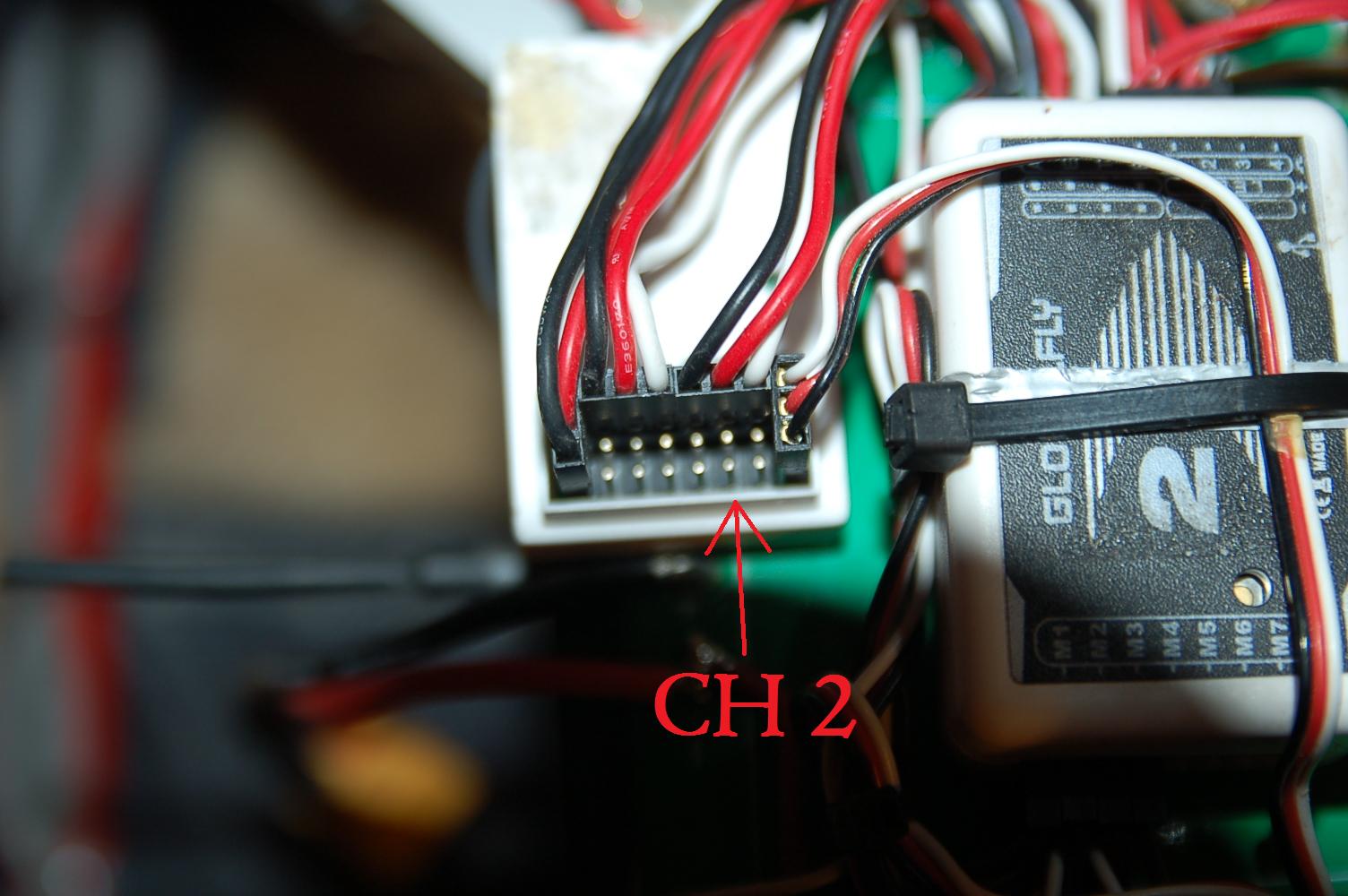
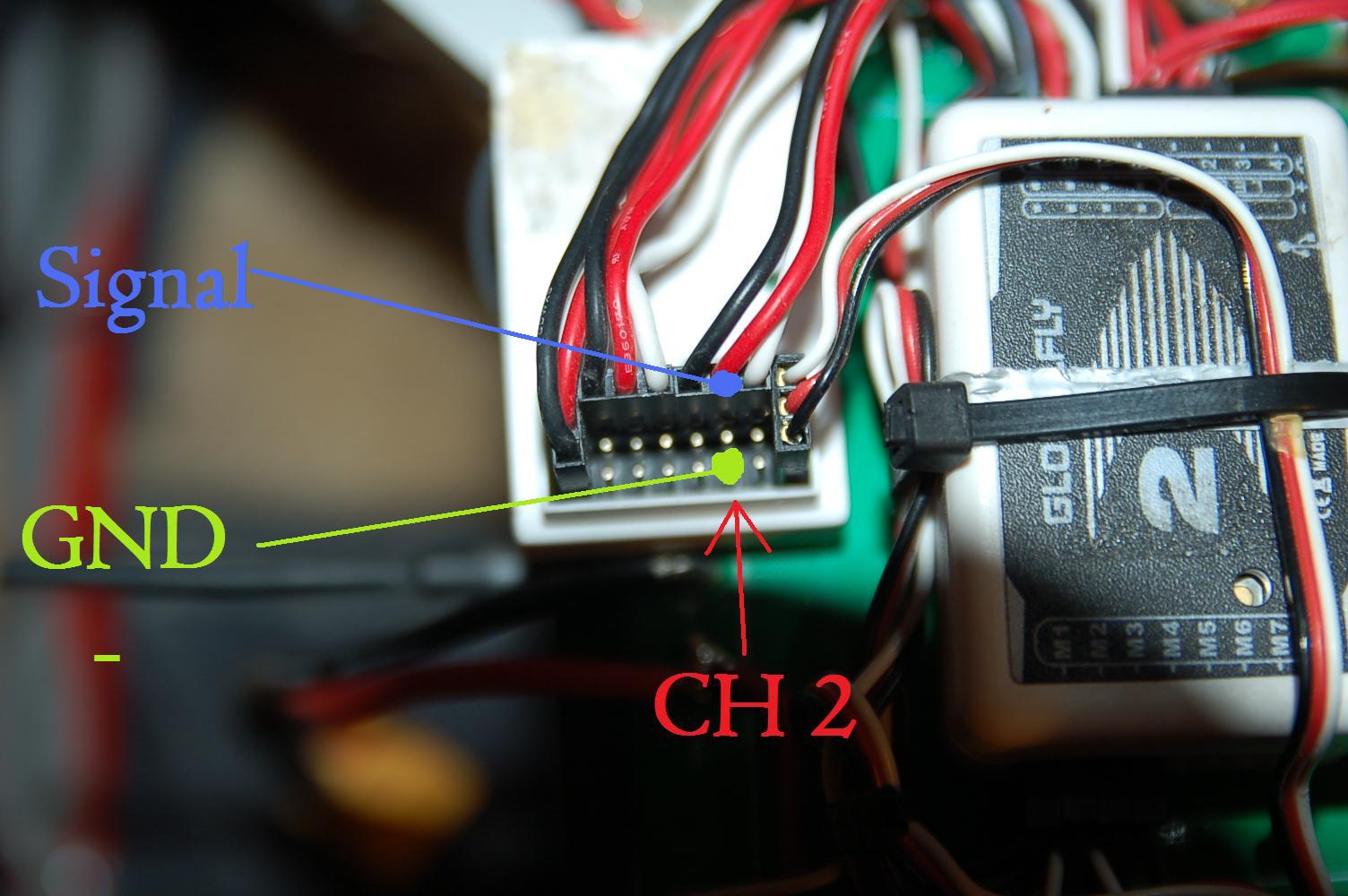
Jeśli ktoś by kiedyś szukał jak wpiąć gimbal bezpośrednio w odbiornik należy to zrobić zgodnie z foto. Podpinamy tylko Signal i GND czyli - pomijając 5V. Daje nam to regulację lewą gałką.Jeśli chcemy możliwość regulacji góra dół podpinamy w gimbalu pod pitch, a w nim samym to już zgodnie z instrukcją od posiadanego modelu Aha to podłączenie w wersji Open-source
Aha to podłączenie w wersji Open-source

Jeśli ktoś by kiedyś szukał jak wpiąć gimbal bezpośrednio w odbiornik należy to zrobić zgodnie z foto. Podpinamy tylko Signal i GND czyli - pomijając 5V. Daje nam to regulację lewą gałką.Jeśli chcemy możliwość regulacji góra dół podpinamy w gimbalu pod pitch, a w nim samym to już zgodnie z instrukcją od posiadanego modelu
śmigiełka do cx-20
orientujecie się czy można gdzieś w Polsce kupić śmigła do tego wynalazku? Przed pierwszym lotem nie dokręciłem jednego i na wysokości 20 metrów, odleciało. Model zaliczył piękny korkociąg. Zakończyło się złamanym śmigłem i pęknięciami na obudowie, pęknięcia posklejane, ale mam przeczucie, że klejenie śmigła to nie najlepszy pomysł... :(