
Zacznę od odpowiedzi na pytanie gdzie to kupić : A TUTAJ
A teraz chciałbym przedstawić wynik mojej dłuuugiej pracy.
Dedykowane OSD do:
- MikroKoptera
- Cyberdrone
- MultiWii
- Dji Naza (v1, v2, Lite)
- Dji WooKong
- Dji A2
- APM, PixHawk i inne z protokołem MavLink
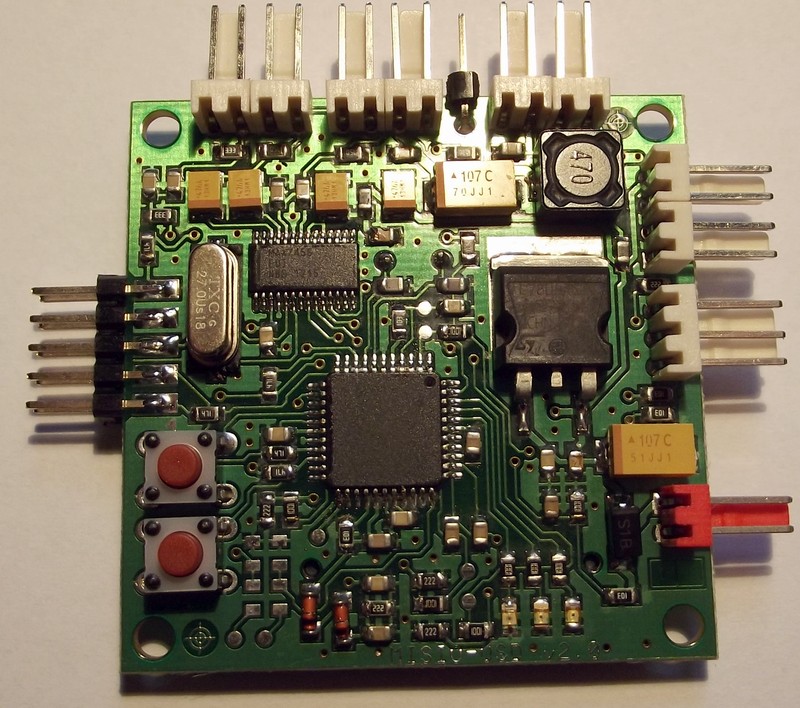
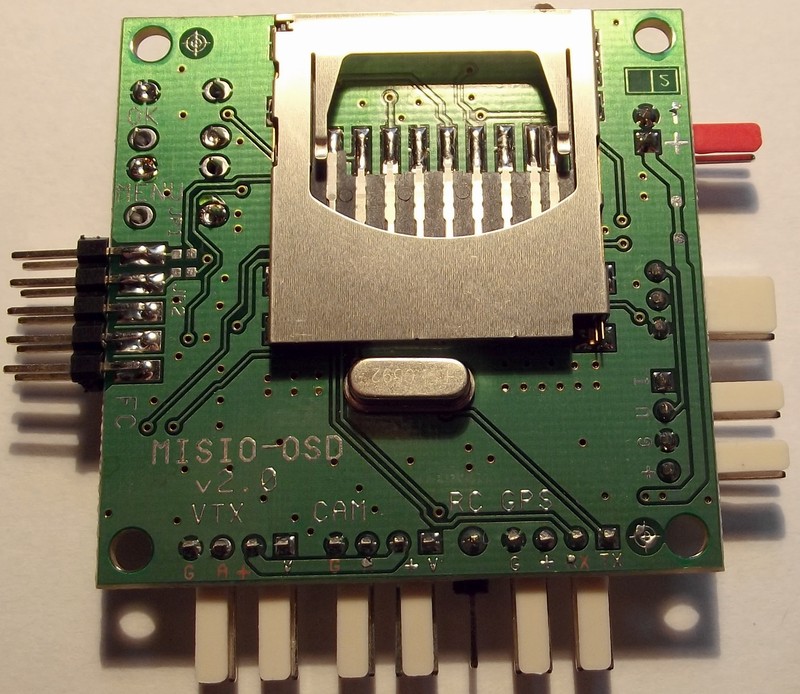
Wymiar płytki to 5x5cm czyli taki sam jak płytki do MK, rozstaw otworów ten sam - przystosowane do umieszczenia "na kanapce"
Aktualnie produkowana wersja płytki 2.0:
 ...
...
TU Jest dostępna instrukcja obsługi w PDF - Wersja 1.1 z dnia 28.03.2016
OSD może współpracować MK wyposażonym w komplet klocków czyli FC, Navi, MKGPS - wtedy wszystkie dane są pobierane z modułu Navi, albo z MK mającym sam Flight Controler. Jeśli mamy sam FC to można dołączyć odbiornik GPS wprost do OSD.
W wersji Multiwii również dane GPS mogą być pobierane albo z odbiornika GPS podłączonego bezpośrednio do OSD albo w przy wersji oprogramowania MultiWii 2.0 lub nowszej - z GPS podłączonego do płytki MultiWii (zarówno serial GPS jak i i2c GPS).
Więcej, samo multiwii może korzystać z danych GPS uzyskanych z OSD do prowadzenia nawigacji (ale ta opcja jeszcze jest w fazie testów). Przy współpracy z Nazą dane GPS są pobierane z GPS Nazy, albo z własnego GPS'a jeśli nie mamy GPS'a do Nazy. Przy współpracy z WooKongiem lub Nazą V2 (z PMU v2) wszystkie dane dą pobierane za pomocą specjalnego interfejsu z magistrali CAN WooKonga. Przy współpracy z MavLinkiem wszystkie dane są popbierane z FC poprzez MavLink.
UWAGA!
Przed podłączeniem OSD do płytki KFC32 Marbalona koniecznie przeczytaj rozdział 2 instrukcji obsługi
Nowa, gadająca wersja Misio-OSD - czyli jak zrobić aby OSD do nas mówiło:
http://rc-fpv.pl/viewtopic.php?p=203950#203950
Możliwości przy podłączeniu z MK bez modułu Navi:
-Odczyt kąta pochylenia i wyświetlanie "sztucznego horyzontu"
-Wysokość (jeśli na FC jest zamontowany czujnik ciśnienia)
-Pasek Variometru (też tylko z czujnikiem ciśnienia)
-Napięcie baterii napędowej (dane pobierane z FC)
-Napięcie baterii Video
-Czas od załączenia zasilania
-Czas lotu
-RSSI z odbiornika RC
-Pobór prądu w A i zużycie baterii napędowej w mAh (wymagane oryginalne regulatory z MKShopu, lub zewnętrzna czujka prądu)
-Temperatura regulatorów (tylko przy oryginalnych regulatorach MK)
-Logowanie parametrów lotu na kartę SD/MMC
-Akustyczny variometr
-Ustawialne z menu akustyczne alarmy na napięcia, zużycie prądu, wysokość ect.
-Wizualna i akustyczna sygnalizacja alarmów (mruganie danej wartości, dźwięk alarmu)
-Sterowanie OSD za pomocą drążków aparatury
-Wyświetlanie statystyk z lotu po rozbrojeniu silników.
Jeśli do OSD podepniemy odbiornik GPS, albo podłączymy je do FC wyposażonego w Navi, to dodatkowo zyskujemy:
-Kąt obrotu (położenie przodu względem północy - tylko przy współpracy z navi)
-Pozycje GPS
-Prędkość
-Wysokość z GPS
-Kurs do bazy (strzałka kierunku do bazy)
-Odległość od bazy
-Ilość widocznych satelit
-Alarm na przekroczenie zadanej odległości.
-Zapis pozycji bazy w momencie uzbrojenia silników
-Wyświetlanie trybu lotu (Free, Position Hold, Coming Home)
OSD posiada na pokładzie filtry do zasilania nadajnika video i kamery - wyjście napięcia baterii video o obciążeniu do 0.8A. Obecnie dostępne płytki mają w standardzie gniazdo wyjściowe do VTX i kamery takie jak do GPS czy czujki prądowej, czyli 4 stykowe z rozstawem 2.54mm. Jeśli ktoś będzie chciał abym założył 2mm pasujące do FOX'ów to proszę o wyraźną informację że mają być złącza do video 2mm !
Złącze do GPS ma wyprowadzenia zgodne z kolejnością stosowaną w odbiornikach GPS Remzibiego, i można takowe odbiorniki stosować jeśli ktoś takowy posiada (małe odbiorniki MTK).
Posiadam też w ofercie odbiorniki GPS, mające dodatkowy akumulatorek podtrzymujący zasilanie zegarka w GPS po odłączeniu głównego zasilania. Umożliwia to złapanie FIX'a w ciągu 10 sekund po zmianie pakietu - jeśli czas od odłączenia do ponownego podłączenia pakietu nie przekroczy godziny.

Jako czujkę prądową można wykorzystać dowolną czujkę z wyjściem 0-5V - zarówno z sygnałem rosnącym jak i malejącym (np czujka do osd Zbiga na układzie ACS750CSA albo czujkę produkcji Pitlaba na niskoomowych rezystorach). Kalibrację czujnika przeprowadza się z menu.
Złącze do RSSI ma dwa wejścia, w konfiguracji można określić które wejście ma być aktywne, lub wybrać tryb dual który podaje wartość z wejścia na którym w danej chwili jest lepszy sygnał. Kalibracje poziomów RSSI przeprowadza się z poziomu menu.( W najnowszym oprogramowaniu aktywne jest tylko jedno wejście - IN1).
OSD posiada 3 niezależne tryby konfiguracji ekranu nazwane umownie "OFF","MIN","ALL". W każdym trybie można przy pomocy programu na PC wybrać który element ma być widoczny, wielkość znaków, włączyć lub wyłączyć szare tło, oraz dowolnie rozmieścić go na ekranie.
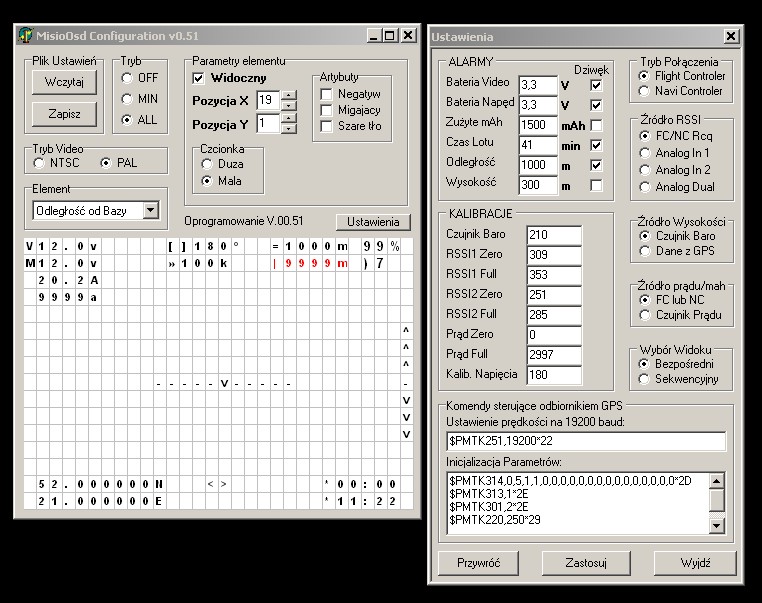
Przed lotem z menu można wybrać który tryb ma być aktualnie używany. Jeśli do styku RC_CTRL podłączymy wolny kanał odbiornika RC, albo wyjście SERVO_3 z FlightControlera, lub wyjscie 7 lub 8 kanału w Cyberdrone, to mamy możliwość przełączania trybu podczas lotu - albo bezpośrednio 3 pozycyjnym przełącznikiem bądź potencjometrem w aparaturze, albo sekwencyjnie przy pomocy 2 położeniowego przełącznika (OFF->MIN->ALL->OFF->MIN....). Najnowsze oprogramowanie umożliwia też zmianę ekranów przy pomocy poziomu 0/1 na tym wejściu - można je podłączyć do jednego z kanałów binarnych eLeReS'a i przy jego pomocy zmieniać tryb wyświetlania.
Niektóre wersje oprogramowania mają możliwość zmiany layoutu ekranu bezpośrednio poprzez wybrany w menu kanał RC. Informacje o stanie tego kanału są pobierane wprost z FC.
OSD ma możliwość prostej aktualizacji oprogramowania przy pomocy interfejsu MKUSB albo SerCon - tego samego co służy do komunikacji MK z programem MKTool, lub dowolnego innego konwertera 5V RS232 (Np. popularny interfejs FTDI - FT232).
Krótki (i zarazem stary) film pokazujący część możliwości tego OSD:
Zamawiając OSD należy zaznaczyć z jakim kontrolerem ma współpracować (MK, CD, MultiWii, Wookong, A2, Naza (Lite,1,2), APM, PixHawk), abym mógł wgrać stosowne oprogramowanie i dodać właściwy kabelek łączący FC z OSD.
Osoby zainteresowane kupnem zapraszam TUTAJ
************************************************************************************
Napisałem dwa małe programiki które potrafią zrobić użytek z logów na karcie.
1. Taki sobie playerek który czyta logi z katry SD w OSD (dla wersji MK, MultiWii i WKM) i pokazuje jak w danym locie machaliśmy drągami
StickPlay

2.Konwerter logów trasy lotu na format KML
Log to KML Konwerter v1.2
Można wczytać plik logu CSV, wygenerować plik KML z zapisem ścieżki lotu i potem obejrzeć nasz lot w google earth.
Działa tylko z MikroKopterem, MultiWii, APM, PixHawkiem, WKM i Naza. Z cyberdronem nie współpracuje ze względu na inny format logowanych danych.
************************************************************************************
Aktualizacja oprogramowania.
Jak to zrobić - napisano w instrukcji obsługi w PDF.
Loader softu- FBOOT_loader Loader softu
Do pobrania pliki z firmware:
Softy "gadające"
Soft 2.04 dla MK z Navi
Soft 2.04 dla MK z samym FC
Soft 2.09 dla WKM / Naza v2 / DJI A2 - dodano suport dla DJI A2
Soft 2.06 dla MultiWii
Soft 2.04 dla Pixhawk/APM
Oraz do kompletu ZESTAW DŹWIĘKÓW do wgrania na kartę SD.
Użytkownicy A2 powinni pobrać ten plik ponownie. Zawiera nowe dźwięki dla A2.
------------------------------------------------------------------------------------------------------------------------
Softy standardowe
- Firmware OSD wersja dla MK v0.75
- Firmware OSD wersja dla Cyberdrone v0.70
- Firmware OSD wersja 0.92 dla FC MultiWii z oprogramowaniem od v2.1
- Firmware OSD wersja 0.90 dla FC Naza V1 lub Naza Lite
Konfigurator:
- Program konfiguracyjny do OSD v0.93 - Pasuje do wszystkich nowszych wersji OSD.
- Program konfiguracyjny do OSD v0.90 - Dla starszych wersji oprogramowania, jeśli Konfigurator 0.93 pisze że jest niekompatybilny plik ustawień.
Interfejs CAN dla WKM/Naza2:
- Firmware dla interfejsu CAN wersja 2.30 - dodano obsługę DJI A2.
- Firmware dla interfejsu CAN wersja 2.20 - dodano wysyłanie telemetrii w formacie SmartPort.
Sposób upgrade interfejsu CAN dla WKM/Naza2 podany jest w instrukcji obsługi.
************************************************************************************
CIACH
Wszystko co tu było jest teraz w instrukcji obsługi - zawsze aktualne.
************************************************************************************
Co zrobić jak się zepsuło...
Podłączyłem na odwrót zasilanie i się zadymiło !
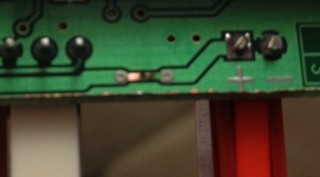
No pewnie że się da, i to w miarę prosto. Co my tu teraz widzimy...
Od góry krater którym uszedł drogocenny dym:

A od dołu spalona ścieżka zabezpieczająca.
Aby to naprawić:
1. Wymieniamy ten kondensator z którego już uleciał dym i nie działa. Ma to być kondensator tantalowy 100uF/16V SMD obudowa "D". Tylko uwaga żeby nie zamontować go na odwrót ! Ma być plusem czyli paskiem do tych dwóch mniejszych żółtych kondensatorów, tak jak na fotce z początku postu.
2. Bierzemy kawałek przewodu "serwowego", wyciągamy z niego 1-2 włoski (cieniutkie druciki) i mostkujemy nimi przepaloną ścieżkę jak na fotce poniżej.

Na koniec sprawdzamy kamerę i nadajnik video (jeśli były podłączone w momencie nieszczęścia).
Zrobiłem zwarcie na wyjściu kamery albo VTX !
W tym przypadku przepaliła się tylko ścieżka zabezpieczająca. Naprawa - tak jak w punkcie 2 powyżej.




