Strona 26 z 29
: środa 03 gru 2014, 19:14
autor: PitLab
Dłubię teraz płytkę wyświetlacza, tak aby znalazła się tam jeszcze klawiatura. Mam taką rozterkę ergonomiczną i chciałbym ją z Wami przedyskutować. Chodzi o rozmieszczenie klawiszy.
W kalkulatorach i telefonach przyzwyczajeni jesteśmy do tego że klawiatura jest pod wyświetlaczem z prostej przyczyny, aby wprowadzając dane nie zasłaniać wyświetlacza.
Ten wyświetlacz ma od spodu tasiemkę mocno rozszerzającą się od dołu, tak że trzeba było by robić otwór w płytce o szerokości przynajmniej 16mm (obecne wcięcie ma 14mm).
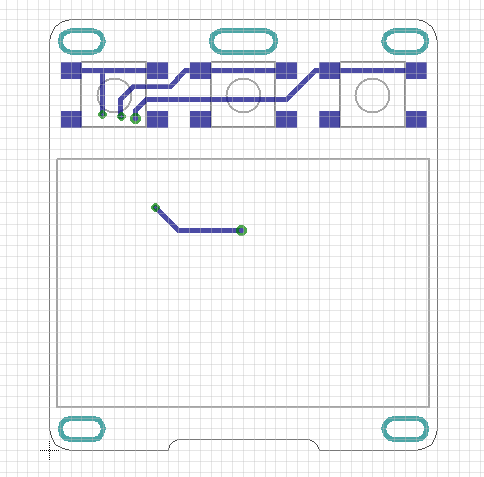
Najwygodniej jest dać klawisze od góry (kratka 1mm):
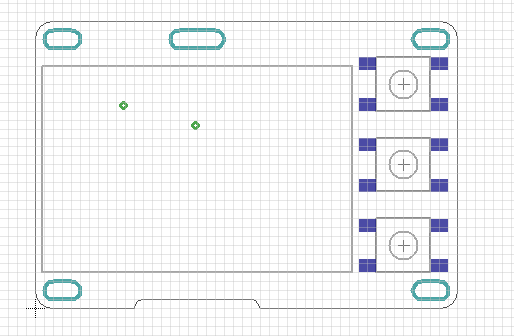
Ewentualna opcja to umieszczenie klawiszy z prawej strony, tak jak w urządzeniach stacjonarnych np oscyloskopach, kuchenkach mikrofalowych itp.
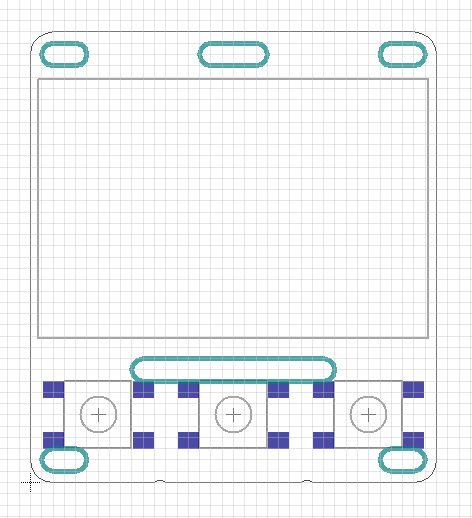
Ostatni wariant siłowy to jednak umieszczenie klawiatury pod tasiemką:
Jak Wam to leży od strony ergonomii?
: środa 03 gru 2014, 19:20
autor: miś
Daj tak jak w na pierwszym rysunku, bo tak najprościej, a w sofcie w inicjalizacji OLED'a ustaw aby wyświetlał obraz do góry nogami. I po kłopocie.
: środa 03 gru 2014, 20:17
autor: PitLab
miś pisze:Daj tak jak w na pierwszym rysunku, bo tak najprościej, a w sofcie w inicjalizacji OLED'a ustaw aby wyświetlał obraz do góry nogami. I po kłopocie.
Dzięki za podpowiedź.
Patrzę jeszcze jak jest z kątem patrzenia na wyświetlacz, ale pisze "free", czyli nie ma żadnego kata bo to nie jest spolaryzowany LCD tylko świecące punkty.
: czwartek 04 gru 2014, 01:06
autor: miś
OLED jak plazma. Patrzysz z dowolnego kąta.
: sobota 13 gru 2014, 13:33
autor: Stema






Podłączenie, programowanie i próby naziemne zakończone.
Jutro oblot. O wynikach dam znać.
Świetny pomysł z tą klawiaturką.
ED: Wczoraj był deszcz, nie było oblotu.
ap dedalus
: środa 17 gru 2014, 11:52
autor: m_atrix
Zbig pisze:To zależy od ustawienia "mix throttle - elevator", jak będzie zero, to nie podniesie SW, tylko grzecznie będzie szybował, aż szybowiec na coś trafi

Dla średnich ustawień lekko zaciągnie SW, co spowoduje zwolnienie modelu i lot na zwiększonych kątach natarcia (mniejsza prędkość, wolniejsze opadanie), dla dużych wartości może (ale nie musi - zależy od modelu) przeciągnąć. Pompowania z racji stabilizacji raczej nie będzie.
W świetle tego co napisałeś, po moim kolejnym locie bixlerem z dedalusem na pokładzie (niestety bez osd wiec ciężko mi to potwierdzić obiektywnie konkretnymi wartościami), mam kilka przemyśleń, odnośnie ustawień limitów :
mix throttle - elevator
min speed
throttle limit
i relacji miedzy nimi.
Oblot na ustawieniach :
throttle limit 80%,
mix throttle - elevator 10%,
min speed 35km/h,
Mam wrażenie że po przełączeniu na AUTO, moc silnika ustawiana jest domyślnie na w/w 80% bez względu na to jaka jest bieżąca prędkość modelu, tak jakby prędkości wcale nie była brana pod uwagę.
Wydaje mi się że throttle limit powinno być traktowane jako wartość max, ale jeśli prędkość modelu jest większą niż min speed, wartość ta mogłaby być skokowo/płynnie zmniejszana, oczywiście przy założeniu lotu poziomego w trybie AUTO = RTH
Podobnie jeśli obecna wysokość modelu jest znacznie większa niż zadany limit, można by się pokusić o wykorzystanie wysokości jako napędu, zamiast pompowanie z silnika, oczywiście w obu przypadkach uwzględniając zadane wartości minimalne i uwzględniając odległość od bazy.
: czwartek 18 gru 2014, 09:23
autor: Zbig
To nie wrażenie, to fakt. Dedalus ma tylko tryb stały gazu. Bo i cel jest jeden: powrót do punktu startu. Szybko i skutecznie.
Prędkość minimalna GPS (względem ziemi) jest tylko po to, żeby model wracał również pod wiatr i nie głupiał GPS. To nie jest stabilizacja prędkości modelu (bo nie mierzymy prędkości względem wiatru).
Również z powodu (możliwego) wiatru nie wykorzystuję samej wysokości, ale również silnik. To minimalizacja ryzyka, bo jaki jest sens optymalizacji np. zużycia pakietu, jeśli celem jest powrót po utracie zasięgu/widoczności, czyli z odległości/wysokości kilkuset metrów?
: czwartek 18 gru 2014, 20:49
autor: Stema
Ja do Vento tak zaprogramowałem AUTO.

Proszę o opinię.
Wciąż pogoda nie zezwala na oblot.
: piątek 19 gru 2014, 09:51
autor: m_atrix
Witam
Zbig pisze:To nie wrażenie, to fakt. Dedalus ma tylko tryb stały gazu. Bo i cel jest jeden: powrót do punktu startu. Szybko i skutecznie.
Co do tego zgadzam się w 100%, powrót szybko i skutecznie to priorytet, ale co później?
To co jest uzasadnione w przypadku powrotu nie koniecznie musi mieć zastosowanie w przypadku kręcenia kółek czy ósemek po dotarciu do domu
Zbig pisze:Również z powodu (możliwego) wiatru nie wykorzystuję samej wysokości, ale również silnik. To minimalizacja ryzyka, bo jaki jest sens optymalizacji np. zużycia pakietu, jeśli celem jest powrót po utracie zasięgu/widoczności, czyli z odległości/wysokości kilkuset metrów?
Pod wiatr to luz bo jest siła nośna, najwyżej nie doleci,ale się nie zwali na łeb,
gorzej z wiatrem, wtedy może być znacznie mnie zabawnie
: piątek 19 gru 2014, 10:49
autor: Zbig
Ale prędkość minimalna GPS względem ziemi służy tylko temu, żeby model nie cofał się lecąc pod silny wiatr. Nie ma żadnego znaczenia, gdy model leci szybciej względem ziemi (np. z wiatrem). Duża wartość tego parametru będzie powodować to, że AP będzie musiał przekraczać podany limit gazu i "żyłować" prędkość nawet przy niewielkim wietrze (np. model leci 30km/h, wiatr "w oczy" 6 km/h i przy limicie 25km/h AP już musi się włączyć algorytm "dopalacza" - zupełnie niepotrzebnie).
Co do ustawień, to na początek mogą być (zakładam, że zweryfikowałeś rewersy) Vento na oko podobny jest do Easy glidera, ja latałem na EG przy stabilizacji przechyłu do 80%, za to z mniejszą kompensacja bocznego wiatru (30%) i mniejszym spowolnieniem zakrętu (30%) no i mniejszą prędkością minimalna GPS (coś koło 10 km/h).
: wtorek 23 gru 2014, 20:51
autor: PitLab
Wczoraj przyszły płytki do pierwszych 3 prototypów, wyświetlacze są już od jakiegoś czasu:
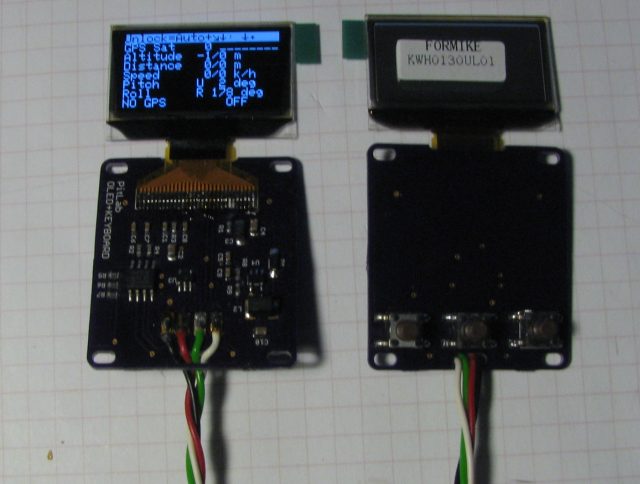
Zabrakło mi taśmy dwustronnej, dlatego wyświetlacz wisi luzem, ale to detal.
Teraz trzeba będzie oprogramować klawiaturę i gdy będzie hulało to uruchomię produkcję.
: środa 24 gru 2014, 12:01
autor: jelcyn
Stema pisze:Ja do Vento tak zaprogramowałem AUTO.
Obrazek
Proszę o opinię.
Wciąż pogoda nie zezwala na oblot.

Do oblotu zrobiłbym tak.
: niedziela 28 gru 2014, 12:13
autor: Stema
Vento jest oblatany i doskonale radzi sobie w powietrzu.
Nie latał tylko z AP.
Czym uzasadniasz takie nastawy?
Re: Autopilot nie dla nas ;-)
: poniedziałek 23 mar 2015, 14:09
autor: bart07
Witam.
Czy jest możliwość wyprowadzenia na któreś z wyjść dodatkowego kanału (odbiornik pracujący w trybie PPM może obsługiwać tylko runkcje autopilota)? Nawet kosztem jednej z lotek.
Pozdrawiam
Bartosz
Re: Autopilot nie dla nas ;-)
: sobota 11 kwie 2015, 18:47
autor: Zbig
Sezon rozpoczęty. Dziś oblatałem SkySurfera z nowym wyświetlaczem z klawiaturką. Wygoda obsługi nieporównywalna.
A SkySurfer? Nie chciał lądować. Ale wracał do bazy jak podpisany weksel