Ale ja nie wiem, czy będę robił to z gratów z wiii. Może kupie oddzielnie układy na małych płytkach pcb. Poza tym chce jest na pcb przytwierdzić wyświetlacz oled.
Ps. Odpowie ktoś na moje pytania w moim kilak wstecz poście?
MultiWiiCopter - jak zbudować niedrogie FC
Moderatorzy: moderatorzy2014, moderatorzy

Płytka - shield mojej produkcji to TYLKO shield - podpiąć można jako sensory COKOLWIEK. Niekoniecznie sensory z Wii. Jakbyś uważnie prześledził temat to byś to wiedział - podpina się do złącza I2C na płytce jakikolwiek sensor na szynie I2C obsługiwany przez MuliWii, np MPU6050 na płytce GY-521 czy jakoś tak.atxmega pisze:Ale ja nie wiem, czy będę robił to z gratów z wiii.
Wyświetlacz OLED podpinasz do tej samej magistrali I2C (no bo to jest jedna wspólna magistrala dla wszystkich urządzeń), Switch'y żadnych nie ma - obsługuje się to z aparatury RC drążkami (kombinacjami drążków).
infekcja FPV postępuje w zastraszającym tempie...
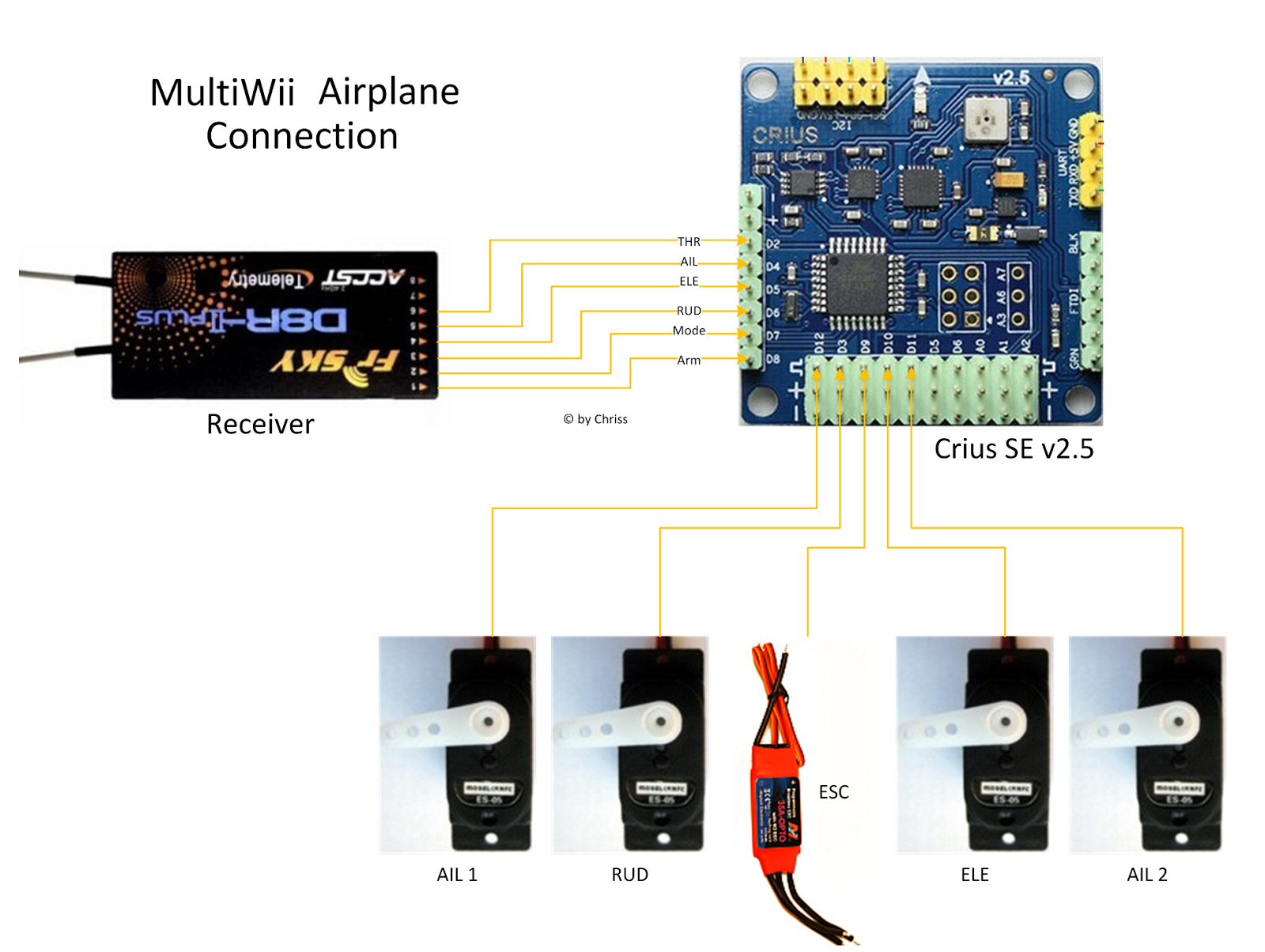
Schemat od zarania MultiWii nie zmienia się, to co pokazywałeś wcześniej jest nadal aktualne. Schematy są na multiwii.com.
Berkely też to ładnie rozrysował onegdaj: http://www.rcgroups.com/forums/showthread.php?t=1340771
Berkely też to ładnie rozrysował onegdaj: http://www.rcgroups.com/forums/showthread.php?t=1340771
infekcja FPV postępuje w zastraszającym tempie...

Mam płytkę Crius SE v2.5, którą z MIŚowym softem będę używał w Prząśniczce:
I chciałem podpiąć podobnie jak mam w AIO buzzer i ledy.
I mam problem, gdzie podpiąć ledy.
Z tego co wyczytałem w tym wątku oraz innych to:
- dzielnik napięcia podpinam pod A3 (100k/33k)
- buzzer pod pin ?który?
MIŚowy soft MW ma coś takiego:
/********************************** Buzzer Pin **********************************/
/* this moves the Buzzer pin from TXO to D8 for use with ppm sum or spectrum sat. RX (not needed if A32U4ALLPINS is active) */
//#define D8BUZZER
Czyli można zapodać buzzer na D8, ale czy tylko w przypadku gdy mamy odbiornik z PPM? (a ja mam akurat wolny tylko FrSy bez PPM)
Pewnie prosta sprawa a ja nie mogę znaleźć rozwiązania grrrr...
I chciałem podpiąć podobnie jak mam w AIO buzzer i ledy.
I mam problem, gdzie podpiąć ledy.
Z tego co wyczytałem w tym wątku oraz innych to:
- dzielnik napięcia podpinam pod A3 (100k/33k)
- buzzer pod pin ?który?
MIŚowy soft MW ma coś takiego:
/********************************** Buzzer Pin **********************************/
/* this moves the Buzzer pin from TXO to D8 for use with ppm sum or spectrum sat. RX (not needed if A32U4ALLPINS is active) */
//#define D8BUZZER
Czyli można zapodać buzzer na D8, ale czy tylko w przypadku gdy mamy odbiornik z PPM? (a ja mam akurat wolny tylko FrSy bez PPM)
Pewnie prosta sprawa a ja nie mogę znaleźć rozwiązania grrrr...
-
acinekenzo
- Posty: 12
- Rejestracja: czwartek 12 wrz 2013, 11:08
- Lokalizacja: Lublin
Mam plytke Twojej konstrukji ( arduwii-copter ), wgranego quada i mam problem z akceleratorem. Nie jest tam oczywiscie oryginalny nunchuk ale chinska podrobka ( uklad 6331 jako niby MMA-6331L ale to chinska podrobka ) i z nim jest pewnein problem. Po dlugich zabawach ze sketchami i roznych testach roznych wersjami multiwii od 1.7 do 2.3 znalazlem ustawienia ktore wydaja sie w miare poprawne. Otoz pod multiwii 2.2 jak ustawie:Rurek pisze:Schemat od zarania MultiWii nie zmienia się, to co pokazywałeś wcześniej jest nadal aktualne. Schematy są na multiwii.com.
Berkely też to ładnie rozrysował onegdaj: http://www.rcgroups.com/forums/showthread.php?t=1340771
1 - wmp - jako gyro
2 - nunchak bez wspoldzialania z wmp gyro - jako acc
to to w jakis sposob dziala. Nie pokazuje bledow, i po skalibrowaniu pokazuje roll i pitch na poziomie +/- 10 ale ciagle latajace i Z na poziomie 200/203. Problemem jest dla mnie owe roll i pitch gdyz jak bym to okreslil "nie moga one usiasc na dupie" - caly czas sie ruszaja pomimo ze plytka lezy bezruchu. Czy to normalne?
I2C pullups bylo wlaczane i wylaczane bez widocznych zmian
magistala i2c dziala na 100mhz ( na 400 nie chce dzialac )
gyro chodzi prowidlowo
Mam problem z płytką Crius SE v2.5. Włączyłem dziś w sofcie (wersja 2.3 chyba) tryb kalibracji regulatorów. Podłączyłem akumulator, regulatory zapikały. Odłączyłem baterię, podpiąłęm znów płytkę przez port FTDI, wgrałem soft z odłączonym trybem kalibracji i od tego momentu nie ma nic. W MWC Config nie ma żadnego sygnału z czujników, sam FC nie reaguje na komendy uzbrajania poprzez aparaturę. Non stop mryga niebieski LED. Nie wiem co mogę zrobić. Już chyba 10 razy wgrywałem różne softy...

Dzięki za odpowiedź. Tak to jest jak się chce zrobić na szybko i nie sprawdzi wszystkiego na spokojnie. Przestawił mi się typ płytki w ustawieniach Arduino, z 16Hz na 5Hz. Zmieniłem i już wszystko działa. Mam jednak kolejny problem, jeden z silników mimo kalibracji szaleje. Sprawdzałem bez śmigieł, po ustawieniu throttle na około połowę całe ramię aż wibruje. Po ruszeniu kopterem w lewo (YAW) zwalnia, przy kręceniu w prawo znów szaleje. Gdy trochę poruszam drążkami znów jakby spowalnia.

Chyba nie będzie potrzeby. Ulotniłem wczoraj model i latał jak na razie dla mnie bardzo stabilnie i przewidywalnie więc moje obawy były raczej niepotrzebne. Quad ma jeszcze problemy z utrzymywaniem wysokości (co jakiś czas spada i tylko dodanie gazu mocno na ok. 90% ratuje go przed opadnięciem) ale chyba uda się to naprawić PIDami.
Witam. Mam konstrukcje opartą na multiwii. Trochę informacji:
Arduino mini mega 328+GY521(MPU6050).Aparatura HK t6a v2. Soft 2.3. Odkomentowane mam tylko:
#define QUADX
#define GY_521
#define MPU6050
No i mam odkomenotwane to co jest od razu po ściągnięciu paczki multwii 2.3.
Mój problem polega na tym, że jest zero reakcji silników na apreturę. Nie mogę ich aktywować w ogóle. Aparatura binduje się z odbiornikiem. W programie exe multwii odczytuje mi dane z GY521-widać ruchy quada jak nim ruszam. Co może być nie tak? Czy apratura może być uszkodzona? Mam ją od znajomego znajomego, który znał sąsiada.... :D
Dzięki i pozdrawiam
Arduino mini mega 328+GY521(MPU6050).Aparatura HK t6a v2. Soft 2.3. Odkomentowane mam tylko:
#define QUADX
#define GY_521
#define MPU6050
No i mam odkomenotwane to co jest od razu po ściągnięciu paczki multwii 2.3.
Mój problem polega na tym, że jest zero reakcji silników na apreturę. Nie mogę ich aktywować w ogóle. Aparatura binduje się z odbiornikiem. W programie exe multwii odczytuje mi dane z GY521-widać ruchy quada jak nim ruszam. Co może być nie tak? Czy apratura może być uszkodzona? Mam ją od znajomego znajomego, który znał sąsiada.... :D
Dzięki i pozdrawiam